"1조-나는홀로"의 두 판 사이의 차이
(→관련 기술의 현황 및 분석(State of the Art)) |
잔글 (→개발 과제의 개요) |
||
| (같은 사용자의 중간 판 2개는 보이지 않습니다) | |||
| 42번째 줄: | 42번째 줄: | ||
'''1. 개발 동기''' | '''1. 개발 동기''' | ||
| − | 현대의 대형 복합시설(코엑스, 스타필드 등)은 규모가 방대하고 내부 구조가 복잡하여 방문객들이 길을 찾거나 시설 정보를 직관적으로 이해하기 어렵다. 기존 2D 안내판이나 모바일 지도는 직관성과 몰입감에서 한계가 있으며, 특히 노인·외국인·관광객에게는 접근성이 낮다. | + | 현대의 대형 복합시설(코엑스, 스타필드 등)은 규모가 방대하고 내부 구조가 복잡하여 방문객들이 길을 찾거나 시설 정보를 직관적으로 이해하기 어렵다. 기존 2D 안내판이나 모바일 지도는 직관성과 몰입감에서 한계가 있으며, 특히 노인·외국인·관광객에게는 접근성이 낮다. 따라서, 체적 디스플레이를 통해서 직관성과 몰입감을 제공하여, 해당 건물 내의 콘텐츠들에 대한 접근성을 확보할 수 있게 한다. |
<hr style="border-top: 1px dashed #ccc; margin: 15px 0;"> | <hr style="border-top: 1px dashed #ccc; margin: 15px 0;"> | ||
| 50번째 줄: | 50번째 줄: | ||
'''3. 독창성''' | '''3. 독창성''' | ||
| − | 기존 대형 복합 시설의 안내 시스템의 경우, 벽에 정보를 부착해두거나, 안내데스크, 혹은 터치스크린을 통한 건물 정보 제공을 하였다. 하지만, 이는 복잡하고 입체적인 복합시설에 활용하기에는 적합하지 않다. 그러나, 본 프로젝트의 기술을 활용하면, 보다 | + | 기존 대형 복합 시설의 안내 시스템의 경우, 벽에 정보를 부착해두거나, 안내데스크, 혹은 터치스크린을 통한 건물 정보 제공을 하였다. 하지만, 이는 복잡하고 입체적인 복합시설에 활용하기에는 적합하지 않다. 그러나, 본 프로젝트의 기술을 활용하면, 보다 공간적인 측면에서 직관적인 이해를 제공하고, 부가적으로 건물에 대한 흥미를 이끌어낸다. |
</div> | </div> | ||
| 64번째 줄: | 64번째 줄: | ||
'''2. 사용자 손동작 조작 환경 구축''' | '''2. 사용자 손동작 조작 환경 구축''' | ||
| − | 단순히 홀로그램을 투영하는 것이 아니라, 길 찾기 및 안내와 같은 서비스를 제공할 수 있도록 손동작으로만 조작할 수 있는 시스템을 구축한다. 예상 사용자인 불특정 다수의 비위생적인 접촉을 피함과 동시에 빠른 속도로 움직이는 투사면과 사용자의 거리를 확보해 안전성을 확보하기 | + | 단순히 홀로그램을 투영하는 것이 아니라, 길 찾기 및 안내와 같은 서비스를 제공할 수 있도록 손동작으로만 조작할 수 있는 시스템을 구축한다. 예상 사용자인 불특정 다수의 비위생적인 접촉을 피함과 동시에 빠른 속도로 움직이는 투사면과 사용자의 거리를 확보해 안전성을 확보하기 위함이다. |
<hr style="border-top: 1px dashed #ccc; margin: 15px 0;"> | <hr style="border-top: 1px dashed #ccc; margin: 15px 0;"> | ||
| 72번째 줄: | 72번째 줄: | ||
'''4. 건물 내부에 대한 디지털 트윈 시스템 구축''' | '''4. 건물 내부에 대한 디지털 트윈 시스템 구축''' | ||
| − | 단순히 저장된 정보를 나열하는 | + | 단순히 저장된 정보를 나열하는 것뿐만 아니라, 실시간으로 해당 장소에 대한 정보를 업데이트할 수 있도록 한다. 특히, 대형 복합 시설의 경우, 단순히 오픈 시간 및 폐점과 같은 정보뿐만 아니라, 인구밀도와 같은 실시간 정보에도 활용이 가능하다. |
</div> | </div> | ||
2025년 12월 17일 (수) 09:18 기준 최신판
프로젝트 개요
기술개발 과제
국문 : 체적 디스플레이를 활용한 대형 복합건물 지도 시스템
영문 : Volumetric Display-based Map System for Large-scale Complexes
과제 팀명
나는홀로
지도교수
황면중 교수님
개발기간
2025년 9월 ~ 2025년 12월 (총 4개월)
구성원 소개
서울시립대학교 기계정보공학과 2020430008 류정현(팀장)
서울시립대학교 기계정보공학과 2020430006 김주원
서울시립대학교 기계정보공학과 2021430011 노태윤
서울시립대학교 기계정보공학과 2022430012 김지호
서울시립대학교 기계정보공학과 2022430028 윤석현
서론
개발 과제의 개요
개발 과제 요약
본 개발 과제는 체적 디스플레이 기술을 활용하여 건물의 구조, 층별 배치, 경로 안내, 행사·매장 정보 등을 3차원 입체 영상으로 제공하는 안내 시스템을 구축하는 것이다. 사용자들은 3D 홀로그램과 유사한 시각 정보를 직관적으로 관찰하고, 손동작 인식 등의 상호작용을 통해 실시간으로 확대·축소·이동·경로 애니메이션 등을 수행할 수 있다. 특히 복층 구조를 지닌 대형 복합시설(쇼핑몰, 컨벤션센터, 복합문화공간 등) 내에서는, 기존 2D 안내판이나 모바일 지도 기반 안내가 가진 한계를 극복하고 몰입감 있는 길 안내 경험을 제공할 수 있다.
개발 과제의 배경
1. 개발 동기
현대의 대형 복합시설(코엑스, 스타필드 등)은 규모가 방대하고 내부 구조가 복잡하여 방문객들이 길을 찾거나 시설 정보를 직관적으로 이해하기 어렵다. 기존 2D 안내판이나 모바일 지도는 직관성과 몰입감에서 한계가 있으며, 특히 노인·외국인·관광객에게는 접근성이 낮다. 따라서, 체적 디스플레이를 통해서 직관성과 몰입감을 제공하여, 해당 건물 내의 콘텐츠들에 대한 접근성을 확보할 수 있게 한다.
2. 개발 효과
사용자는 3D 홀로그램을 관찰·상호작용하며 건물에 대한 정보를 얻을 수 있으며, 이는 미래형 공간정보 서비스로서 차별적 가치를 지닌다. 특히, 복층의 시설에서 길을 찾을 때 직관적이고 명확한 안내를 받을 수 있다.
3. 독창성
기존 대형 복합 시설의 안내 시스템의 경우, 벽에 정보를 부착해두거나, 안내데스크, 혹은 터치스크린을 통한 건물 정보 제공을 하였다. 하지만, 이는 복잡하고 입체적인 복합시설에 활용하기에는 적합하지 않다. 그러나, 본 프로젝트의 기술을 활용하면, 보다 공간적인 측면에서 직관적인 이해를 제공하고, 부가적으로 건물에 대한 흥미를 이끌어낸다.
개발 과제의 목표 및 내용
1. 체적 디스플레이 기술의 구현 및 개선
빔프로젝터의 투사면을 엑추에이터로 구동하여, 홀로그램을 나타내는 체적 디스플레이 기술을 구현한다. 더 나아가, 단순히 기술을 구현하는 것을 넘어, 추가적인 기구 설계를 통해 출력 부피를 확장한다. 이는 대형 복합 시설의 건물을 안내하는 해당 프로젝트의 특성상 높이에 대한 정보를 제공할 필요가 있기 때문이다.
2. 사용자 손동작 조작 환경 구축
단순히 홀로그램을 투영하는 것이 아니라, 길 찾기 및 안내와 같은 서비스를 제공할 수 있도록 손동작으로만 조작할 수 있는 시스템을 구축한다. 예상 사용자인 불특정 다수의 비위생적인 접촉을 피함과 동시에 빠른 속도로 움직이는 투사면과 사용자의 거리를 확보해 안전성을 확보하기 위함이다.
3. 길 찾기 및 건물 안내 서비스 제공
사용자에게 필요한 정보인 건물 내부 안내 및 길 찾기 기능을 불편함 없이 직관적으로 제공하는 것을 목표로 한다.
4. 건물 내부에 대한 디지털 트윈 시스템 구축
단순히 저장된 정보를 나열하는 것뿐만 아니라, 실시간으로 해당 장소에 대한 정보를 업데이트할 수 있도록 한다. 특히, 대형 복합 시설의 경우, 단순히 오픈 시간 및 폐점과 같은 정보뿐만 아니라, 인구밀도와 같은 실시간 정보에도 활용이 가능하다.
관련 기술의 현황
관련 기술의 현황 및 분석(State of the Art)
기술 개념 및 유형
1. 스웹트 볼륨 (Swept Volume) 방식
스크린 회전/진동 방식

- 특성: 2D 이미지를 투사하는 스크린을 고속으로 회전하거나 진동(왕복)시켜, 인간의 눈의 잔상 효과(POV: Persistence Of Vision)를 이용해 3D 볼륨 이미지를 생성
- 원리: 공간 내 특정 좌표들에 광원을 배치하거나 빛을 산란시켜 입체상 구현
- 장점:
- ✅ 실제 공간에 3D 이미지를 형성하므로 안경 없이 다각도 관측 가능
- 단점:
- ❌ 고속 구동 부품(모터 등)으로 인한 소음 및 안전 문제
2. 정적 체적 (Static Volume) 방식

정적 체적 디스플레이

- 특성: 움직이는 기계적 요소 없이, 광원을 직접 점처럼 발광시키거나 투명/불투명 매체 내에서 빛의 활성화를 통제
- 장점:
- ✅ 기계적 구동부가 없어 내구성이 좋고 소음이 없음
- 단점:
- ❌ 복잡한 광학 설계 필요
3. 기타 접근 (Holography / Light Field)
- 특성: 광학 홀로그래피나 라이트 필드 기술을 통해 3D 표현 시도
- 한계: 계산 복잡성, 방대한 데이터 전송량, 공간 해상도 제약으로 인해 완전한 상용화에는 어려움이 있음
실제 제품 및 응용 사례
1. 상용화 현황

전시장 홀로그램 연출

- 주요 분야: 대형 전시장, 박물관, 광고 미디어 아트 등
- 구현 방식:
- 대부분 투명 스크린 및 프로젝터, 혹은 홀로그램 영사 장치를 이용
- 실제 체적(Volumetric) 기술보다는 '페퍼스 고스트(Pepper's Ghost)'와 같은 착시 기반 디스플레이(Pseudo-hologram)가 주류를 이룸
기술적 제약 및 도전 과제
1. 화질 및 광학적 성능
- 해상도 vs 볼륨: 볼륨(표시 공간)이 커질수록 동일한 해상도(복셀 밀도)를 유지하기 어려움
- 휘도 및 밝기: 밝은 환경에서도 시인성을 확보할 수 있는 충분한 밝기 구현 난이도 상존
- 오클루전(Occlusion): 일반적인 입체 화소는 전 방향으로 빛을 방사하므로, 뒤에 있는 객체가 가려지지 않고 투과되어 보이는 '유령 효과' 발생
2. 시스템 및 제어
- 실시간 렌더링: 3D 모델을 여러 단면으로 분할(Slicing)하고 실시간으로 조작하는 과정에서 막대한 계산량 및 데이터 전송 대역폭 요구
- 광학 정렬/동기화: 스크린의 회전/반사면 진동 등 하드웨어 동작과 영상 출력이 나노초 단위로 정확히 맞아떨어지는 정밀 동기화 제어 필수
- 입력 인터페이스: 제스처 인식, 동작 추적 등 사용자와 상호작용하기 위한 인터페이스 통합의 어려움
3. 하드웨어 확장성
- 스케일 업(Scale-up): 시스템을 대형화할수록 제작 비용이 기하급수적으로 증가하며, 회전/진동 구조의 기계적 안정성과 내구성 확보가 난해함
시장상황에 대한 분석
경쟁제품 조사 비교
| 제품 / 솔루션 | 체적(3D 볼륨) 구현 여부 |
특징 및 성능 | 인터랙션 | 강점 | 약점 / 제약 | 본 과제 대비 차별 가능 요소 |
|---|---|---|---|---|---|---|
| Voxon VX1 | 여 |
|
제한된 상호작용 가능 |
|
|
|
| Proto (Holographic display) |
여 (제한적 3D 효과) |
|
터치, 카메라 연동 등 |
|
|
|
| 전통적 터치스크린 (키오스크 / 2D 안내판) |
부 (2D) |
|
터치 기반 |
|
|
|
| AR 안내 앱 (스마트폰 기반) |
부 (2D/AR) |
|
터치, AR 추적 |
|
|
|
마케팅 전략 제시
1. 차별화된 경험 제공 (Experience Marketing)
- 몰입형 안내: 기존 2D 지도나 키오스크가 제공하지 못하는 직관적인 공간감과 깊이감을 제공하여 사용자의 흥미 유발 및 정보 습득 효율 증대
- 공공 디자인: 설치 자체가 하나의 볼거리가 되는 공공 디자인 조형물로서의 가치 강조
2. 타겟 시장 선정 (Niche Market Targeting)
- 복합 쇼핑몰 및 대형 병원: 구조가 복잡하고 층간 이동이 빈번하여 입체적인 길 안내가 필수적인 공간 공략
- 전시 및 박람회: 관람객의 이목을 집중시키고 부스 위치를 효과적으로 안내해야 하는 행사 중심 마케팅
3. B2B 솔루션 제안
- 설치 및 유지보수 용이성: 기존 Voxon 등 고가 장비 대비 합리적인 구축 비용과 낮은 유지보수 난이도 강조
- 커스터마이징: 설치 장소의 특성(층수, 구조)에 맞춘 맞춤형 3D 지도 데이터 제작 서비스 연계
개발과제의 기대효과 및 파급효과
가. 기술적 기대효과
기술적 기대효과
- 대형 복합공간 내 중대형 체적 디스플레이 구현 기술 확보: 기존 소형 디스플레이의 한계를 넘어, 실제 공간에 적용 가능한 스케일의 Volumetric Display 구축 노하우 축적
- 실시간 3D 경로 안내 알고리즘 및 애니메이션 처리 기술: 복잡한 실내 공간 데이터를 시각화하고, 사용자에게 최적 경로를 직관적인 3D 애니메이션으로 제공하는 소프트웨어 역량 강화
- 제스처 기반 인터랙션 및 사용자 입력 처리 통합: 비접촉 인터페이스(제스처, 동작 인식)를 체적 디스플레이와 결합하여 자연스러운 사용자 경험(UX) 설계 기술 확보
- 광학 동기화 제어 기술 (스크린 타이밍 제어): 고속으로 움직이는 스크린과 프로젝터 투사 타이밍을 정밀하게 동기화하는 하드웨어 제어 기술 고도화
- 콘텐츠 제작 파이프라인 최적화: 3D 모델링 데이터를 체적 디스플레이용 슬라이싱(Slicing) 데이터로 변환하고 송출하는 효율적인 워크플로우 구축
나. 경제적 및 사회적 파급효과
경제적 효과
- 시설 이미지 상승: 복합시설·쇼핑몰 등에 첨단 시스템 설치로 랜드마크로서의 브랜드 가치 제고
- 수익 창출: 유휴 시간대를 활용한 3D 광고 송출 및 콘텐츠 서비스 구독 모델 도입 가능
- 지속적 매출 확보: 연간 유지보수 계약 및 시즌별/행사별 3D 콘텐츠 교체 사업으로 장기적인 수익 모델 마련
- 투자 회수: 초기 설치비 회수 및 장기적인 수익성을 고려한 비즈니스 모델 설계 가능
사회적 및 문화적 효과
- 직관적인 안내 제공: 2D 지도 해석에 어려움을 겪는 방문객에게 직관적이고 접근성 높은 공간 안내 서비스 제공
- 유니버설 디자인: 외국인, 노약자 등 언어와 인지 능력에 상관없이 누구나 이해하기 쉬운 시각 안내 체계 구축
- 미래형 공간 경험: 스마트 시티/스마트 빌딩 솔루션과 연계하여 방문객에게 차별화된 미래형 공간 경험 조성
- 공간 가치 향상: 단순한 정보 전달을 넘어 공간 자체의 문화적, 체험적 가치를 향상시키는 미디어 아트로 활용
기술개발 일정 및 추진체계
| 작업 | 기여자 | 9월 | 10월 | 11월 | 12월 | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | ||
| 주제선정 | 전원 | ||||||||||||||||||||
| 기구설계 | 윤석현 | ||||||||||||||||||||
| 자료조사 | 전원 | ||||||||||||||||||||
| 손동작 인식개발 | 김주원, 노태윤 | ||||||||||||||||||||
| COEX 현장 조사 및 설계 근거 확보 | 김지호 | ||||||||||||||||||||
| 기구 배치 및 프레임 설계 | 류정현, 윤석현 | ||||||||||||||||||||
| 제품 주문 | 전원 | ||||||||||||||||||||
| 시제품 제작 | 전원 | ||||||||||||||||||||
| 소프트웨어 시스템 통합 | 노태윤 | ||||||||||||||||||||
| 모터 및 센서 배치 및 구동 | 류정현 | ||||||||||||||||||||
| 샤프트 밀림 현상 트러블슈팅 | 전원 | ||||||||||||||||||||
| 기어 고정 풀림 문제 트러블 슈팅 | 전원 | ||||||||||||||||||||
| 손동작 인식 개선 | 김주원 | ||||||||||||||||||||
| 필요 기계요소 가공 | 노태윤, 김지호 | ||||||||||||||||||||
| 특허 관련 조사및 서류 작성 | 윤석현 | ||||||||||||||||||||
| 슬라이싱 - 모터 동기화 작업 | 류정현 | ||||||||||||||||||||
| 프로젝트 마무리 | 전원 | ||||||||||||||||||||
구성원 및 추진체계

설계
설계사양
1. 3D 안내 정보 제공 기능 : 시각 안정성과 입체 가시성, 안내 정보 가독성 확보
2. 사용자 인터랙션 기능 : 조작 정확도와 사용자 안정성 확보
3. 운영 안정성 기능 : 유지보수 편의성과 내구성 확보
설계사양
| 항목 | 기준 | 설계사양 |
|---|---|---|
| 시각 안정성 | 연속 24 fps 이상 | 왕복 운동의 해상도를 24fps 이상으로 유지하여 잔상 및 끊김 없이 부드러운 안내 홀로그램을 제공해야 함 |
| 입체 가시성 | 왕복 구동 높이 160 mm 이상 |
사용자가 길 안내와 지도를 3D 형태로 안정적이고 명확하게 인지할 수 있도록 입체 정보를 최소 160mm 이상의 왕복 스트로크를 확보하며, 관찰 거리에서 명확한 깊이감이 인지되도록 설계 |
| 안내 정보 가독성 | 유효 투사 면적 600 mm × 450 mm 이상 |
안내 정보(문자/아이콘)가 사용자 시야에서 명확히 식별될 수 있도록 투사 화면 영역 확보 및 왜곡 최소화 |
| 조작 정확도 (손동작) |
정의된 각 손동작별 90% 이상 |
사용자 손동작(예: 좌/우 이동 등)을 90% 이상 정확도로 인식하며 오인식 발생률을 시험 데이터 기반으로 검증 |
| 사용자 안전성 | 작동 위험부 노출 0% | 회전체/가동부가 외부로 노출되지 않도록 보호 처리하고, 사용 중 접촉 위험이 없어야 함 |
| 유지보수 편의성 | 조정/교체 10분 이내 | 소모품 또는 구동부 접근·교체가 공구 최소화로 10분 이내에 가능해야 함 |
| 내구성 | 연속 1시간 이상 작동 시 이상 없이 지속 동작 가능 |
진동과 충격, 왕복 동작 중에도 정상 동작을 유지하도록 설계하며, 공차 등 안전 여유 확보 |
제품 요구사항
가. 제품 요구사항
| 번호 | 요 구 사 항 | D or W | 비고 |
|---|---|---|---|
| 1 | 투사된 영상이 입체적으로 보여야 함 | D | 대 |
| 2 | 투사된 지도에서 각 위치를 구별할 수 있어야 함 | D | 대 |
| 3 | 길찾기 기능이 최단 경로를 도출해야 함 | D | 대 |
| 4 | 안전성에 문제가 없어야 함 | D | 대 |
| 5 | 투사된 영상이 자연스러워야 함 | W | 중 |
| 6 | 지도 상 변경점을 반영할 수 있어야 함 | W | 중 |
| 7 | 핸드 모션 입력이 빠르고 정확해야 함 | W | 중 |
| 8 | 소음, 진동이 적어야 함 | W | 중 |
| 9 | 최적 경로 표시가 직관적이어야 함 | W | 소 |
| 10 | 지도 외 다양한 영상을 띄울 수 있어야 함 | W | 소 |
나. 목적계통도

개념설계안
구동 메커니즘 선정 및 결정
본 프로젝트의 핵심인 체적 디스플레이 구현을 위해, 스크린을 20~30Hz로 고속 왕복 운동시킬 수 있는 구동 방식을 비교 분석하였다.
1. 구동 방식 비교
- 보이스 코일 모터 (Voice Coil Motor): 직선 운동이 정확하고 소음이 적으나, 무거운 스크린 구동 시 발열 문제와 추력 부족 발생 최종보고서.pdf]
- 링크 구조 (Link Mechanism): 제작이 쉽고 큰 힘을 낼 수 있으나, 사점(Dead point)에서의 진동과 소음, 고속 구동 시 내구성이 약함 최종보고서.pdf]
- 컴플라이언트 구조 (Compliant Mechanism): 마찰이 없어 수명이 길지만, 재료의 탄성 한계로 인해 필요한 왕복 거리(160mm 이상)를 확보하기 어려움 최종보고서.pdf]
2. 최종 선정: 플라이휠 (Flywheel) 방식

플라이휠 구동 메커니즘

- 선정 이유:
- 대형 스크린의 긴 스트로크(160mm)를 감당하면서도, 플라이휠의 관성 모멘트를 이용해 모터 부하를 줄이고 일정 속도를 유지하는 데 가장 유리함.
- 링크 방식보다 마찰과 에너지 손실을 줄여 장시간 구동 안정성 확보 가능 최종보고서.pdf]
이론적 계산 및 시뮬레이션
역학적 계산 및 검증
1. 하중 및 필요 구동력 계산
- 구동 하중: S45C 재질의 회전 원판 및 체결 부품을 포함하여 설계 하중을 약 1.5kg으로 산정
- 가속도 및 힘:
- 목표 진동수 15Hz(왕복 30회) 기준, 최대 가속도는 약 $799.5 m/s^2$
- 이를 구동하기 위해 슬라이더에 필요한 힘은 약 300N 이상으로 도출됨
2. 시뮬레이션 검증
구조 해석 결과 (Inventor)
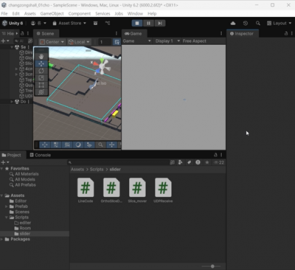
구동 시뮬레이션 (Unity)


- 구조 해석 (CAE): Autodesk Inventor를 이용한 응력 해석 결과, 최대 응력 110MPa 발생. 알루미늄 항복강도 대비 안전율 4.0을 확보하여 구조적 안전성 검증
- 동작 시뮬레이션: Unity 엔진 상에서 가상 구동을 수행하여 부품 간 간섭 없이 정상적인 왕복 운동이 가능함을 확인
상세설계 내용
기구·회로·소프트웨어 설계 상세
1. 기구 상세 설계 (Hardware)
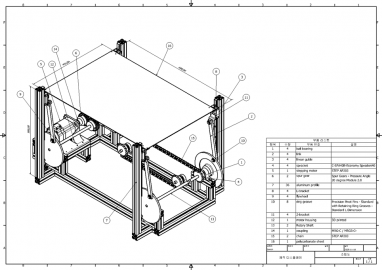
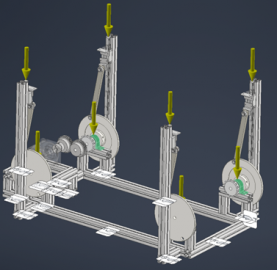
전체 조립도

- 프레임: 3030 알루미늄 프로파일을 사용하여 진동에 강한 강성 확보
- 주요 부품:
- - 플라이휠: SUS304 재질, 외경 180mm, 두께 7.5mm로 가공하여 관성 효과 극대화
- - 메인 샤프트: SUS303 재질, 직경 12mm, 길이 412mm
- - 모터 하우징: PLA 소재 3D 프린팅으로 제작하여 모터 고정
2. 제어 및 회로 설계 (Control & Circuit)
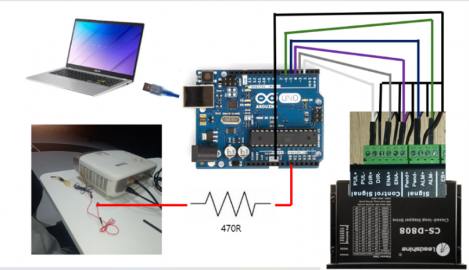
회로 연결도

- 제어부: Arduino Uno를 메인 컨트롤러로 사용하며 PC와 시리얼 통신 수행
- 구동부: Leadshine CS-D808 클로즈루프 드라이버를 사용하여 탈조 방지 및 정밀 제어
- 전원부: SMPS (36V, 350W)를 사용하여 고출력 모터에 안정적인 전원 공급
- 동기화: 빔프로젝터 컬러휠의 120Hz 신호를 아두이노가 수신하여 스크린 위치와 영상 투사 타이밍을 동기화
3. 소프트웨어 설계 (Software)
- 핸드 트래킹: Python(MediaPipe, CVZone)을 활용해 웹캠으로 손동작(Swipe, Zoom, Rotate)을 실시간 인식
- 통신: 인식된 제스처 데이터를 UDP 소켓 통신(Port 5052)으로 Unity에 전송
- 3D 렌더링: Unity 엔진에서 건물 모델(COEX)을 로드하고, 스크린 위치에 맞춰 실시간으로 단면(Slicing)을 생성하여 프로젝터로 투사
결과 및 평가
완료 작품의 소개
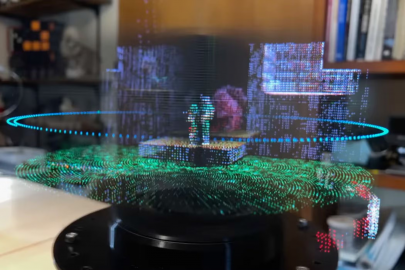
프로토타입 사진 혹은 작동 장면

주요 구성 요소(모터, 기어, 체인, 스프라켓)

제품 측면

제품 윗면



포스터

관련사업비 내역서
재료비 및 사업비 상세 내역
| 항 목 (품명, 규격) | 수 량 | 단 가 (단위: 천원) |
금 액 (단위: 천원) |
|---|---|---|---|
| 커플링 (내경 12-14) | 1 | 34.3 | 34.3 |
| 경제형 스프로켓 40 (톱니수 14) | 4 | 12.7 | 50.6 |
| 볼 베어링 유닛 (내경 12) | 4 | 10.3 | 41.3 |
| 회전축 (길이 412mm) | 2 | 53.6 | 107.2 |
| 회전축 (길이 50mm) | 1 | 9.5 | 9.5 |
| 금속 와셔 (두께 3.4) | 4 | 6.6 | 26.4 |
| 경제형 폴리카보네이트 플레이트 표준형 (2mm) | 1 | 32.0 | 32.0 |
| 판금 장착판·브래킷 - Z 벤딩 타입 (2mm) | 4 | 15.3 | 61.4 |
| 금속 와셔 (두께 7.4) | 5 | 8.4 | 42.1 |
| 금속 와셔 (두께 2.5) | 5 | 6.6 | 32.9 |
| 금속 와셔 (두께 1) | 20 | 5.8 | 116.6 |
| 힌지핀 (길이 22) | 8 | 2.6 | 20.8 |
| 평기어 (톱니수 30) | 2 | 33.3 | 66.6 |
| 플라이휠 (외경 180mm) | 4 | 115.1 | 460.3 |
| L형 판금 장착판·브래킷 - 센터 분할 (2mm) | 4 | 10.2 | 40.7 |
| (新)경제형 리니어가이드 경하중 표준 블록 (300mm) | 4 | 46.3 | 185.2 |
| 스냅아이들 (체인 호칭 C2040) | 2 | 223.0 | 446.1 |
| 클램프 링크 (두께 12mm) | 4 | 40.9 | 163.5 |
| 링크 (길이 200mm) | 4 | 17.4 | 69.8 |
| 경제형 체인 40 (C-CHE40-120) | 1 | 23.4 | 23.4 |
| 경제형 체인 40 (조인트/오프셋 링크) | 1 | 1.9 | 1.9 |
| MRG 리지드 커플링 (32mm) | 1 | 51.8 | 51.8 |
| 경제형 샤프트 스트레이트형 (60mm) | 2 | 8.9 | 17.8 |
| 볼 베어링 유닛 (필로타입) | 4 | 19.6 | 78.6 |
| 경제형 체인 40 (표준 체인 116 링크) | 2 | 22.8 | 45.6 |
| 아크릴판 (2T 700mm * 456mm) | 1 | 13.5 | 13.5 |
| 배송비 (미스미) | 1 | 3.0 | 3.0 |
| 30용 이너 브라켓 (90도) | 10 | 0.9 | 8.8 |
| 접시머리랜치볼트 (M4*10) | 40 | 0.1 | 2.8 |
| T너트 (30용 M4) | 40 | 0.2 | 6.4 |
| T 볼트 너트 세트 (30용) | 75 | 0.2 | 13.5 |
| 다이캐스팅브라켓 (30 * 25) | 65 | 0.5 | 32.5 |
| 3030 알류미늄 프로파일 (372mm) | 2 | 4.0 | 7.9 |
| 3030 알류미늄 프로파일 (44mm) | 4 | 2.0 | 4.0 |
| 3030 알류미늄 프로파일 (70mm) | 10 | 1.0 | 9.9 |
| 3030 알류미늄 프로파일 (100mm) | 6 | 1.0 | 5.9 |
| 3030 알류미늄 프로파일 (130mm) | 4 | 2.0 | 7.9 |
| 3030 알류미늄 프로파일 (140mm) | 2 | 2.0 | 4.0 |
| 3030 알류미늄 프로파일 (180mm) | 2 | 2.0 | 4.0 |
| 3030 알류미늄 프로파일 (500mm) | 4 | 5.0 | 19.8 |
| 3030 알류미늄 프로파일 (700mm) | 2 | 6.9 | 13.9 |
| 배송비 (영진-1) | 1 | 21.0 | 21.0 |
| 3030 알루미늄 프로파일 (120mm) | 2 | 2.0 | 4.0 |
| 3030 알루미늄 프로파일 (170mm) | 2 | 2.0 | 4.0 |
| 3030 알루미늄 프로파일 (640mm) | 2 | 6.9 | 13.9 |
| 배송비 (영진-2) | 1 | 3.0 | 3.0 |
| 3030 알루미늄 프로파일 (610mm) | 4 | 6.9 | 27.7 |
| 3030 알루미늄 프로파일 (312mm) | 1 | 2.0 | 4.0 |
| 3030 알루미늄 프로파일 (70mm) | 2 | 1.0 | 2.0 |
| 3030 알루미늄 프로파일 (230mm) | 1 | 3.0 | 3.0 |
| 이너브라켓 (3030 90도) | 20 | 0.9 | 17.6 |
| T너트 (30 M4) | 30 | 0.2 | 4.8 |
| T볼트-너트 세트 (30용) | 30 | 0.2 | 5.4 |
| 다이캐스팅 브라켓 (3030) | 30 | 0.5 | 15.0 |
| 접시머리나사 (M4 * 10mm) | 30 | 0.1 | 2.1 |
| 배송비 (영진-3) | 1 | 3.0 | 3.0 |
| 배송비 (영진-4) | 1 | 6.0 | 6.0 |
| T형 수동복스 (30용) | 1 | 3.3 | 3.3 |
| T너트 (30용m4) | 50 | 0.2 | 8.0 |
| T-볼트너트세트 (30용) | 90 | 0.2 | 16.2 |
| 브라켓 (3030용) | 20 | 0.5 | 10.0 |
| 플레이트브라켓 (30용 I형) | 10 | 0.5 | 4.8 |
| 배송비 (영진-5) | 1 | 3.0 | 3.0 |
| 커터 40 체인 도구 (25-60) | 1 | 17.8 | 17.8 |
| 드림펜 충전 USB 미니 B타입 (0.6m) | 1 | 1.0 | 1.0 |
| STM32 (NUCLEO-F103RB) | 1 | 19.2 | 19.2 |
| 알류미늄 봉 (외경 12mm 길이 1m) | 1 | 8.8 | 8.8 |
| 배송비 (네이버-1) | 1 | 2.7 | 2.7 |
| 배송비 (네이버-2) | 1 | 3.0 | 3.0 |
| 배송비 (네이버-3) | 1 | 4.0 | 4.0 |
| 프로젝션 필름 화이트 (1524 * 1000mm) | 1 | 48.0 | 48.0 |
| 융헤라 (-) | 1 | 3.0 | 3.0 |
| 내열 절연 전선 (20m) | 5 | 7.7 | 38.5 |
| 라즈베리파이 15.6인치 모니터 | 1 | 163.3 | 163.3 |
| 18AWG 6색 실리콘 와이어 키트 (30m) | 1 | 25.3 | 25.3 |
| 웹캠 au100 (80*75*115mm) | 1 | 15.5 | 15.5 |
| LRS-350-36 (SMPS 350W) | 1 | 59.6 | 59.6 |
| 마그네틱 로터리 위치 센서 (12bit) | 1 | 9.1 | 9.1 |
| Arducam IMX219-AF (1/4인치) | 1 | 55.0 | 55.0 |
| 볼트몰 흑색 십자 접시머리 나사 (M4 6mm) | 42 | 0.0 | 2.0 |
| 육각너트 스텐 (M4) | 15 | 0.1 | 0.9 |
| 스텐 십자 트라스머리 볼트 (M4 8mm) | 23 | 0.1 | 1.3 |
| 배송비 (쿠팡-1) | 3 | 3.0 | 6.0 |
| 배송비 (쿠팡-2) | 1 | 2.8 | 2.8 |
| USB TO RJ45 RS232/콘솔케이블 | 1 | 9.0 | 9.0 |
| CAT6 FTP 랜연장 젠더 (I형) | 1 | 15.7 | 15.7 |
| DP to HDMI V2.0 케이블 (2m) | 1 | 4.2 | 4.2 |
| 고릴라 전동 임팩트 해머드릴 세트 | 1 | 53.9 | 53.9 |
| 둥근 볼트 너트와샤세트 (m5 * 80) | 4 | 0.3 | 1.3 |
| m5 볼트 세트 (m5 * 40) | 50 | 0.1 | 5.9 |
| Leadshine 클로즈 루프 드라이버 (CS-D808) | 1 | 146.3 | 146.3 |
| Leadshine 2상 스텝서보 모터 (CS-M23480) | 1 | 143.0 | 143.0 |
| chatgpt Pro 요금제 (1달) | 1 | 310.5 | 310.5 |
| 합 계 | 3,742.6 | ||
완료작품의 평가
| 평 가 항 목 | 평가방법 | 적용기준 | 개 발 목표치 |
비중 (%) |
평가결과 |
|---|---|---|---|---|---|
| 1. 시각 안정성 | IR 센서, 모터 펄스를 통한 계산 | 연속 동작 시 유지되는 프레임 | 연속 24 fps 이상 | 20% | 12/20 |
| 2. 입체 가시성 | 구동 높이 측정 | 동작 시 투사면 왕복 높이 | 왕복 구동 높이 160 mm 이상 | 10% | 4/10 |
| 3. 안내 정보 가독성 | 투사 면적 측정 | 투사 시 유효 면적 | 유효 투사 면적 600 mm × 450 mm 이상 | 15% | 15/15 |
| 4. 조작 정확도 | 30회 반복 테스트 | 손동작 인식률 | 정의된 각 손동작별 인식률 90% 이상 | 20% | 20/20 |
| 5. 사용자 안전성 | 전체 부피 중 위험 부위 노출 비율 측정 | 작동 부위 노출 비율 | 작동 위험부 노출 0% | 5% | 3/5 |
| 6. 유지 보수 편의성 | 교체 시간 측정 | 주요 부품 교체 시간 | 조정/교체 10분 이내 | 10% | 10/10 |
| 7. 내구성 | 연속 작동 테스트 | 연속 구동 시 정상 동작 지속 여부 | 연속 1시간 이상 작동 시 이상 없이 지속 동작 가능 | 15% | 15/15 |
| 합 계 (평가 점수) | 79 / 100 | ||||
향후계획
- 홀로그램 품질 향상: 모터의 성능을 끌어올려 더 많은 토크와 안정성을 확보할 예정이다. 이를 통해 고품질 홀로그램을 사용자에게 제공하여 최상의 시각적 경험을 제공할 계획이다. 특히 close-loop step 모터가 아닌 dc 모터에 엔코더를 부착한 산업용 모터를 이용하고, 여러 센서를 사용하여 소프트웨어적 처리(슬라이싱) 보정이 추가된다면 강한 토크와 부하에서도 최상의 홀로그램을 제공할 수 있을 것이다.
- 진동 및 소음 최소화: 기계적으로 진동에 강한 나사 및 소재를 활용하여 진동 및 소음에 사용자들이 노출되는 수준을 낮추어 사용자 경험을 끌어올릴 계획이다. 특히, 현재는 특수 고무 소재 및 특수 윤활제만을 사용했으나, 향후에는 각각의 부분에 진동 감쇄 소재를 배치하고, 유격을 최소화한 설계로 더욱 감소된 진동과 소음을 보여줄 것이다.
- 디지털 트윈 시스템 구축: 길 찾기 및 디지털 트윈 시스템을 더욱 확실하게 구축할 계획이다. 특히 실시간으로 DB에 있는 정보를 불러와 소프트웨어적으로 사용자/관리자에게 편의성을 제공할 수 있다. 단순히 건물의 방 형상을 나타내는 현재의 수준에서 더 나아가 방의 구체적인 형상 및 부스까지 나타내어 사용자에게 구체적인 정보를 제공하는 것을 기대할 수 있다.
