"2조-최강 몬스터즈"의 두 판 사이의 차이
MIE capstone
(→상세설계 내용) |
(→상세설계 내용) |
||
| 129번째 줄: | 129번째 줄: | ||
::'''5) 로봇 팔''' | ::'''5) 로봇 팔''' | ||
::[[파일:control_circuit_5.png|400픽셀]] | ::[[파일:control_circuit_5.png|400픽셀]] | ||
| + | |||
| + | :'''소프트웨어 설계''' | ||
| + | ::'''가. 사용시나리오''' | ||
| + | |||
| + | ::'''나. 기능별 알고리즘''' | ||
| + | :::'''1) 송신기-수신기 통신 알고리즘''' | ||
| + | |||
| + | :::'''2) YOLO 활용 야구공 인식''' | ||
| + | |||
| + | :::'''3) OpenCV 활용 야구공 위치 계산''' | ||
| + | |||
| + | :::'''4) 로봇 제어 알고리즘1(야구공이 위치한 좌표로의 이동)''' | ||
| + | |||
| + | :::'''5) 로봇 제어 알고리즘2(야구공 추적)''' | ||
| + | |||
| + | :::'''6) 로봇 제어 알고리즘3(야구공 수거 후 복귀)''' | ||
==결과 및 평가== | ==결과 및 평가== | ||
2023년 12월 15일 (금) 06:58 판
프로젝트 개요
기술개발 과제
국문 : 파울 볼 자동 수거 시스템
영문 : Automatic Foul Ball Collection System
과제 팀명
최강 몬스터즈
지도교수
이광훈 교수님
개발기간
2023년 9월 ~ 2023년 12월 (총 4개월)
구성원 소개
서울시립대학교 기계정보공학과 20184300** 김*빈(팀장)
서울시립대학교 기계정보공학과 20184300** 권*빈
서울시립대학교 기계정보공학과 20184300** 김*형
서울시립대학교 기계정보공학과 20184300** 신*훈
서울시립대학교 기계정보공학과 20184300** 이*구
서론
개발 과제의 개요
개발 과제 요약
내용
개발 과제의 배경
내용
개발 과제의 목표 및 내용
내용
관련 기술의 현황
관련 기술의 현황 및 분석(State of art)
- 전 세계적인 기술현황
내용
- 특허조사 및 특허 전략 분석
내용
- 기술 로드맵
내용
시장상황에 대한 분석
- 경쟁제품 조사 비교
내용
- 마케팅 전략 제시
내용
개발과제의 기대효과
기술적 기대효과
내용
경제적, 사회적 기대 및 파급효과
내용
기술개발 일정 및 추진체계
개발 일정
내용
구성원 및 추진체계
내용
설계
설계사양
제품의 요구사항
내용
설계 사양
내용
개념설계안
내용
이론적 계산 및 시뮬레이션
내용
상세설계 내용
- 조립도
- 가. 조립도
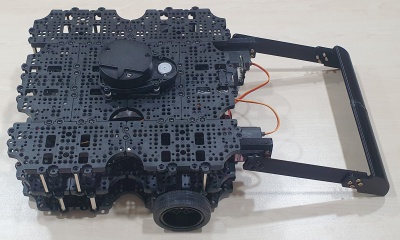
- 본 프로젝트의 수거 로봇의 최종 모델링은 아래 사진과 같다.
- 가. 조립도

- 나. 조립 순서
- 1) 수거 로봇 지지대에 모터 조립
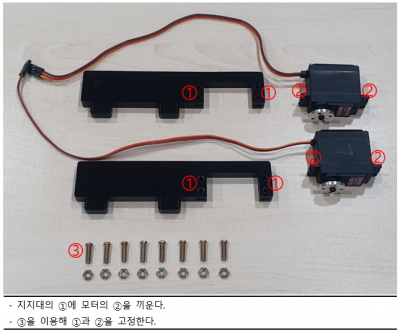
- 나. 조립 순서

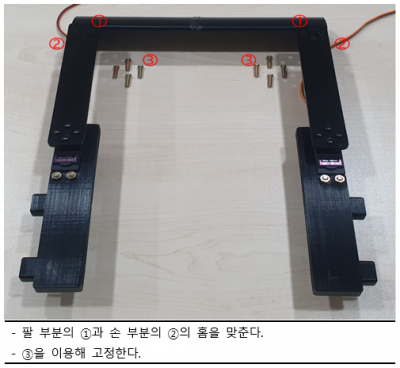
- 2) 지지대와 팔 부분 조립


- 3) 팔 부분과 손 부분 조립

- 4) 로봇과 지지대 조립
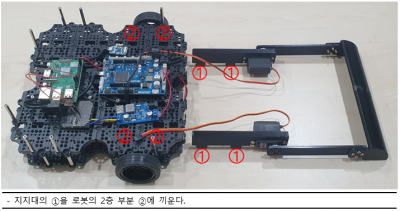

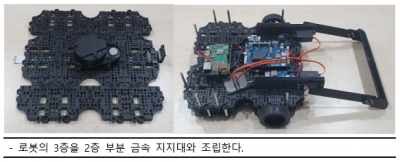
- 5) 로봇의 3층 부분과 2층 부분 조립

- 부품도
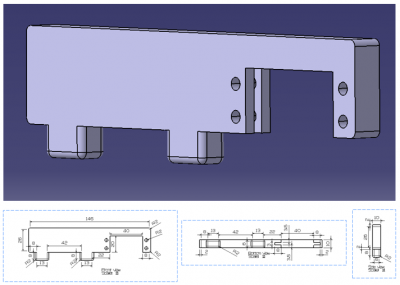
- 1) 수거 로봇 지지대

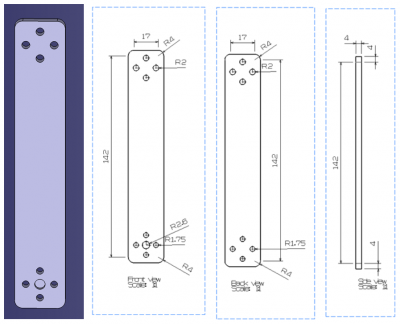
- 2) 수거 로봇 팔

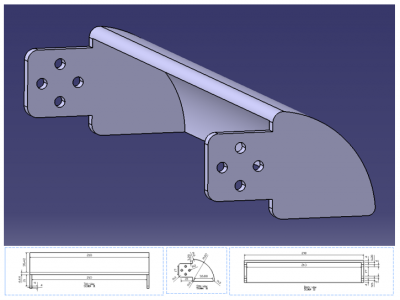
- 3) 수거 로봇 손

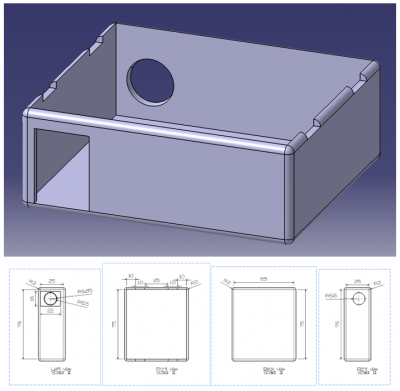
- 4) 신호기 박스

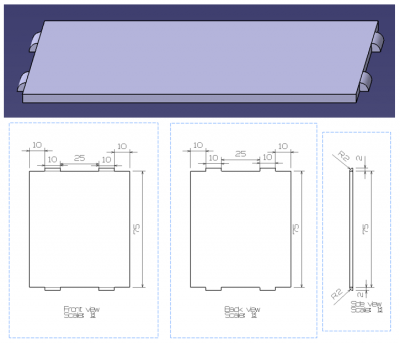
- 5) 신호기 뚜껑

- 제어부 및 회로설계
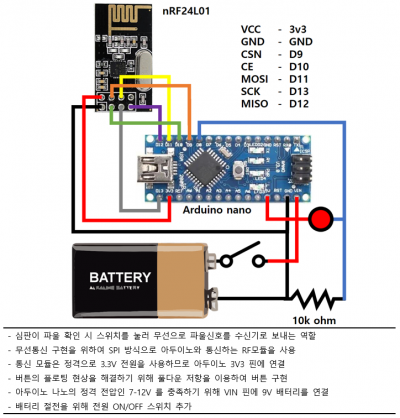
- 1) 리모컨 송신부

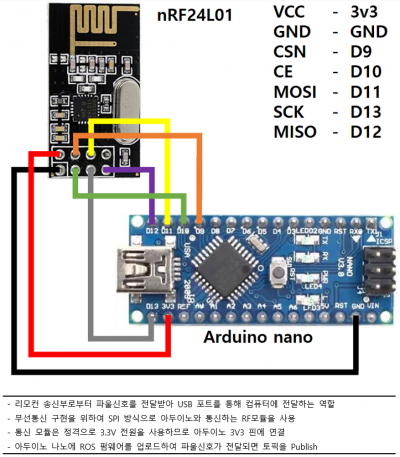
- 2) 리모컨 수신부

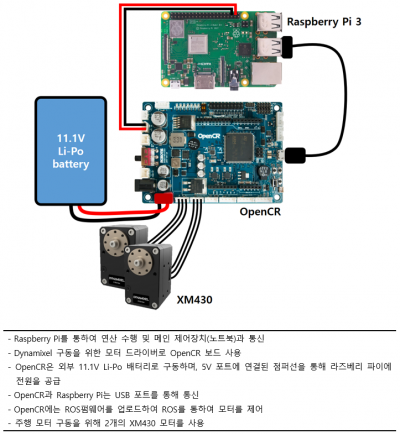
- 3) 구동 및 전원부

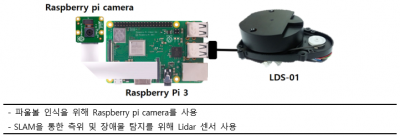
- 4) 센서부

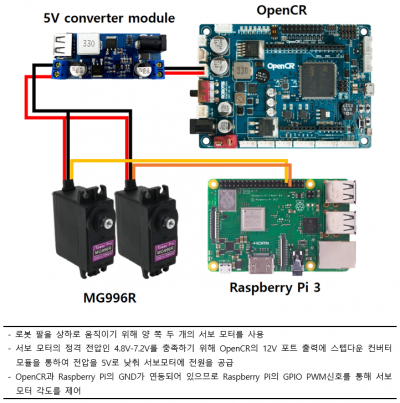
- 5) 로봇 팔

- 소프트웨어 설계
- 가. 사용시나리오
- 나. 기능별 알고리즘
- 1) 송신기-수신기 통신 알고리즘
- 나. 기능별 알고리즘
- 2) YOLO 활용 야구공 인식
- 3) OpenCV 활용 야구공 위치 계산
- 4) 로봇 제어 알고리즘1(야구공이 위치한 좌표로의 이동)
- 5) 로봇 제어 알고리즘2(야구공 추적)
- 6) 로봇 제어 알고리즘3(야구공 수거 후 복귀)
결과 및 평가
완료 작품의 소개
프로토타입 사진 혹은 작동 장면
내용
포스터
내용
관련사업비 내역서
내용
완료작품의 평가
내용
향후계획
내용
특허 출원 내용
내용