"이조"의 두 판 사이의 차이
(→1) 센싱기술) |
(→관련 기술의 현황) |
||
| 44번째 줄: | 44번째 줄: | ||
===관련 기술의 현황=== | ===관련 기술의 현황=== | ||
====State of art==== | ====State of art==== | ||
| − | ====1) 센싱기술==== | + | =====1) 센싱기술===== |
기존 실리콘 의족과 스마트 의족의 가장 큰 차이는 센싱 기술이다. 현재 의족에 적용되는 센싱 기술에는 크게 두 가지가 있다. 첫번째로는 각도센서이다. 오르막길, 내리막길, 평지에서의 보행 상태가 각기 다르므로 의족 사용자에게 오르막길, 내리막길에 최적화된 보행을 제공할 필요가 있다. 따라서, 오르막길과 내리막길을 판단하기 위해 각도센서(기울기센서)를 발바닥 부분에 부착해 사용자가 어느 정도의 경사에 위치하고 있는지 파악한다. 두번째로는 압력센서이다. | 기존 실리콘 의족과 스마트 의족의 가장 큰 차이는 센싱 기술이다. 현재 의족에 적용되는 센싱 기술에는 크게 두 가지가 있다. 첫번째로는 각도센서이다. 오르막길, 내리막길, 평지에서의 보행 상태가 각기 다르므로 의족 사용자에게 오르막길, 내리막길에 최적화된 보행을 제공할 필요가 있다. 따라서, 오르막길과 내리막길을 판단하기 위해 각도센서(기울기센서)를 발바닥 부분에 부착해 사용자가 어느 정도의 경사에 위치하고 있는지 파악한다. 두번째로는 압력센서이다. | ||
[[파일:111.png|450픽셀|가운데|섬네일|보행주기]] | [[파일:111.png|450픽셀|가운데|섬네일|보행주기]] | ||
[스트레인 게이지를 이용한 대퇴의지의 보행정보 획득 기법(엄수홍, 임영광, 유성봉, 이웅혁) 대한전자공학회 학술대회, 2016]을 참고하면 사용자의 보행상태를 발꿈치 닿기 (Hill Contact, 1단계) -> 발바닥 닿기 (Foot flat, 2단계) -> 중간 디딤 (Mid stance, 3단계) -> 발꿈치 떼기 (Heel off, 4단계) -> 밀기 (Push off, 5단계) -> 발가락 떼기 (Toe off, 6단계) -> 흔들기 (Swing, 7단계) -> 발꿈치 닿기 (Heel Contact, 8단계)와 같이 총 8단계로 정의하고 있다. 각 단계 별 발바닥에 가해지는 압력의 위치와 세기가 다르다는 점을 활용하여 의족 발바닥에 부착된 압력센서를 통해 얻은 데이터로 사용자의 보행상태를 파악한다. 또한, 오르막길과 내리막길 보행 시 압력센서를 통해 측정되는 데이터로 평지 보행인지, 경사 보행인지를 파악할 수 있으므로 각도 센서 역할도 한다. | [스트레인 게이지를 이용한 대퇴의지의 보행정보 획득 기법(엄수홍, 임영광, 유성봉, 이웅혁) 대한전자공학회 학술대회, 2016]을 참고하면 사용자의 보행상태를 발꿈치 닿기 (Hill Contact, 1단계) -> 발바닥 닿기 (Foot flat, 2단계) -> 중간 디딤 (Mid stance, 3단계) -> 발꿈치 떼기 (Heel off, 4단계) -> 밀기 (Push off, 5단계) -> 발가락 떼기 (Toe off, 6단계) -> 흔들기 (Swing, 7단계) -> 발꿈치 닿기 (Heel Contact, 8단계)와 같이 총 8단계로 정의하고 있다. 각 단계 별 발바닥에 가해지는 압력의 위치와 세기가 다르다는 점을 활용하여 의족 발바닥에 부착된 압력센서를 통해 얻은 데이터로 사용자의 보행상태를 파악한다. 또한, 오르막길과 내리막길 보행 시 압력센서를 통해 측정되는 데이터로 평지 보행인지, 경사 보행인지를 파악할 수 있으므로 각도 센서 역할도 한다. | ||
| − | ====2) 보행 보조 알고리즘==== | + | =====2) 보행 보조 알고리즘===== |
스마트 의족의 가장 큰 기능은 보행 보조 기능이다. 하지절단장애인들에게 단순 절단 부위의 외관을 대체하는 의족이 아닌 비장애인과 동일한 보행을 제공하는 것이다. 기울기센서, 압력센서를 통해 의족 사용자의 보행상태를 파악한 후 압력센서와 아두이노를 연동하여 모터의 회전속도와 각도를 조절한다. 즉, 사람의 발목관절을 한 개의 모터가 대체하는 것이다. 그러므로 모터의 제어가 매우 관건이라고 할 수 있다. 모터를 제어하기 위해 압력 센서, 기울기 센서, 자이로 센서 등 다양한 제어기법이 존재하지만 현재 모터를 제어하는 가장 발달된 기술은 정상 다리의 보행을 인식하여 그에 적합한 속도와 각도로서 모터를 제어하는 기법이다. 하지가 절단된 부분에 의족을 착용하고 의족에 탑재된 카메라가 절단되지 않은 즉, 정상보행을 하는 다른 한 쪽의 다리를 카메라로 인식한다. 정상 보행하는 다리의 움직임과 속도를 파악하여 의족에 달린 모터를 제어하여 절단되지 않은 다리의 보행을 구현하는 것이다. 이에 더 나아가 현재 외부에서 데이터를 받아 모터를 제어하는 수동적 제어가 아닌 근전도 센서를 이용하여 사용자가 의지적으로 의족을 제어하는 의지적 제어를 향한 노력이 진행되고 있다. | 스마트 의족의 가장 큰 기능은 보행 보조 기능이다. 하지절단장애인들에게 단순 절단 부위의 외관을 대체하는 의족이 아닌 비장애인과 동일한 보행을 제공하는 것이다. 기울기센서, 압력센서를 통해 의족 사용자의 보행상태를 파악한 후 압력센서와 아두이노를 연동하여 모터의 회전속도와 각도를 조절한다. 즉, 사람의 발목관절을 한 개의 모터가 대체하는 것이다. 그러므로 모터의 제어가 매우 관건이라고 할 수 있다. 모터를 제어하기 위해 압력 센서, 기울기 센서, 자이로 센서 등 다양한 제어기법이 존재하지만 현재 모터를 제어하는 가장 발달된 기술은 정상 다리의 보행을 인식하여 그에 적합한 속도와 각도로서 모터를 제어하는 기법이다. 하지가 절단된 부분에 의족을 착용하고 의족에 탑재된 카메라가 절단되지 않은 즉, 정상보행을 하는 다른 한 쪽의 다리를 카메라로 인식한다. 정상 보행하는 다리의 움직임과 속도를 파악하여 의족에 달린 모터를 제어하여 절단되지 않은 다리의 보행을 구현하는 것이다. 이에 더 나아가 현재 외부에서 데이터를 받아 모터를 제어하는 수동적 제어가 아닌 근전도 센서를 이용하여 사용자가 의지적으로 의족을 제어하는 의지적 제어를 향한 노력이 진행되고 있다. | ||
| − | ====3) 충격 완화 설계==== | + | =====3) 충격 완화 설계===== |
[[파일:123123.png|300픽셀|가운데|섬네일|충격완화설계]] | [[파일:123123.png|300픽셀|가운데|섬네일|충격완화설계]] | ||
기존의 실리콘 의족은 절단부위와 의족 간의 접합 부분에서 발생하는 마찰로 인해 사용자의 피로 누적을 초래한다. 따라서, 실리콘 의족의 경우 평균 사용시간이 4시간을 넘지 못한다. 이러한 문제를 해결하고 사용 시간을 늘리고자 현재 의족에는 충격 완화 기술이 적용된다. 충격 완화 기술의 경우에 스프링 Damper를 사용한 방식, 공압 Damper 또는 유압 Damper가 적용된다. 2018년 12월, 한국기계연구원에서 출시한 스마트 의족에는 탄성력을 가진 댐퍼가 아닌 고탄성 탄소섬유 재질을 이용한 충격 완화기능을 적용하였다. 별도의 댐퍼가 없기 때문에 의족의 무게를 절감할 수 있고 구조를 단순화시킬 수 있다는 장점이 있다. 이처럼 현재 스마트 의족에 충격 완화 기능이 적용되어 사용자의 피로도 누적을 감소시켜 사용시간을 10시간 이상으로 늘렸다. | 기존의 실리콘 의족은 절단부위와 의족 간의 접합 부분에서 발생하는 마찰로 인해 사용자의 피로 누적을 초래한다. 따라서, 실리콘 의족의 경우 평균 사용시간이 4시간을 넘지 못한다. 이러한 문제를 해결하고 사용 시간을 늘리고자 현재 의족에는 충격 완화 기술이 적용된다. 충격 완화 기술의 경우에 스프링 Damper를 사용한 방식, 공압 Damper 또는 유압 Damper가 적용된다. 2018년 12월, 한국기계연구원에서 출시한 스마트 의족에는 탄성력을 가진 댐퍼가 아닌 고탄성 탄소섬유 재질을 이용한 충격 완화기능을 적용하였다. 별도의 댐퍼가 없기 때문에 의족의 무게를 절감할 수 있고 구조를 단순화시킬 수 있다는 장점이 있다. 이처럼 현재 스마트 의족에 충격 완화 기능이 적용되어 사용자의 피로도 누적을 감소시켜 사용시간을 10시간 이상으로 늘렸다. | ||
2019년 12월 19일 (목) 04:09 판
프로젝트 개요
기술개발 과제
국문 : 길이조절기능과 보행보조기능을 탑재한 로봇의족
영문 : Robot prosthetics with length control and waling aids
과제 팀명
이조
지도교수
김상주 교수님
개발기간
2019년 9월 ~ 2019년 12월 (총 4개월)
구성원 소개
서울시립대학교 기계정보공학과 20144300** 이**(팀장)
서울시립대학교 기계정보공학과 20144300** 김**
서울시립대학교 기계정보공학과 20144300** 서**
서울시립대학교 기계정보공학과 20144300** 송**
서울시립대학교 기계정보공학과 20144300** 한**
서론
개발 과제의 개요
개발 과제 요약
하퇴 절단 장애인들에게 필요한 의족에 길이 조절 기능을 탑재하여 맞춤형 의족을 사용하지 않고도 많은 사람들이 사용할 수 있게 만들고, 충격 완화 장치를 추가하여 오랫동안 사용했을 때 피로감을 줄이며, 보행 보조 기능을 탑재하여 비장애인들과 유사한 보행을 할 수 있도록 하는 의족을 설계하고자 한다.
개발 과제의 배경 및 효과
의족은 하지 절단 장애인의 이동 능력을 생성해줌으로써 일상생활 영위 및 직장생활에 절대적으로 필요한 신체기능 대체기기이다. 현재 상용으로 판매되고 있는 수동형 의족은 대부분 맞춤형 제작 형태로 이루어지기 때문에 가격이 수천만원 대이고 실제 사용자의 만족도도 크지 않다. 2018년 말, 스마트 의족이 등장하면서 사용자의 편의성과 피로도를 개선함으로써 만족도는 올랐지만 3000만원 대의 가격으로 인해 개인 사용자가 감당하기엔 여전히 큰 금액 부담이 존재한다. 이러한 의족을 주문제작 형태에서 보급형 형태로 전환하여 가격을 절감하면서 기존의 스마트 의족이 가지고 있는 우수한 만족도를 유지한다면 저소득층 하지 절단 장애인들도 큰 부담없이 의족을 사용할 수 있을 것이다.
개발 과제의 목표와 내용
제작하고자 하는 보급형 스마트 의족은 제작비를 최소화하여 하퇴 절단으로 의족을 사용해야 하는 저소득층 환자들이 저렴한 가격에 사용할 수 있는 의족으로 일반 보급형 의족이 가지고 있지 않은 기능들을 추가하여 경쟁력을 갖춘 제품이다. 우선 몸체 길이를 조절하여 다리 길이와 하지 절단 부위에 따라서 사용자에 맞춰서 사용할 수 있도록 길이 조절이 가능한 구조로 제작하려고 한다. 또한 사용자가 의족을 사용함으로써 느끼는 피로를 최소화할 수 있는 충격 완화 장치와, 사용자의 걸음을 보조하는 모터와 제어장치를 추가하여 보행을 더 편하게 만들어주는 기능을 추가하고자 한다. 이 제품을 제작함으로써 의족을 사용할 수 없는 저소득층 하퇴 절단 환자들에게 의족을 보급하고, 보행 보조기능을 통해서 환자들의 편리한 생활을 지원하는 것을 목표로 한다. 만들고자 하는 제품이 보급형 의족이므로 사용자의 조건에 맞게 길이를 조절할 필요가 있다. 사용자의 다리 길이와 하지 절단 부위에 따라서 의족의 길이가 달라져야 하므로, 이를 조절할 수 있다면 다양한 사용자들이 맞춤 의족을 사용할 필요가 줄어들 것이라고 예상한다. 사용자에 따라 20cm 정도를 조절하여 사용할 수 있도록 제품을 설계하고자 한다. 길이를 조절한 이후에 이를 고정할 수 있는 수단이 필요하다. 고정이 느슨하여 의족의 길이가 갑자기 줄어들 경우에 크게 다칠 수 있는 위험이 있으므로 오랫동안 고정할 수 있어야 한다. 자전거 안장과 같은 물건들에 사용하는 방법과 같이 나사를 이용하는 방법과 스크류를 이용하는 방법 중에서 하중을 잘 버티고 흔들리지 않는 안전성이 좋은 방법을 선택한다. 그리고 보행 보조기능을 추가함으로써 사용자가 걸을 때, 실제 발목처럼 움직여 사용자가 걷는 것을 도와주고자 한다. 발목 부분이 움직이지 않는 수동식 의족의 경우에 경사진 길을 걸어갈 때에 사용자에게 불편함을 주고, 절단부에 고통을 주게 된다. 이를 해결하기 위해서 의족에 압력 센서와 모터를 장착하여 실제 발목이 움직이는 것처럼 바닥 경사에 따라서 발목 부분이 회전하는 정도와 속도, 강도 등을 조절한다. 모터가 움직이는 방향과 힘이 의도에 맞지 않는 경우에 예상치 못한 사고가 발생할 수 있으므로, 다양한 상황에서의 검사를 통해서 정확하게 움직이는지 철저하게 확인할 필요가 있다. 또한 보행 보조기능을 사용하기 위해서 필요한 전력을 공급할 배터리가 필요하고 의족을 사용하면서 불편함이 크지 않도록 배터리와 관련하여 여러가지 기능이 필요하다. 배터리가 방전되어 보행 보조기능이 정지하지 않도록 배터리 부족 알람 기능을 추가하고, 어플리케이션 등을 이용한 배터리 잔량 확인과 예상 사용 가능시간 등을 알리는 기능을 추가하여 사용자에게 편의성을 주고자 한다. 마지막으로 하지절단 장애인이 의족을 사용함에 있어서 걸음을 옮길 때마다 절단부에 가해지는 압력에 의해서 피로감을 주게 되고 사용자가 불편함을 느끼게 된다. 이러한 불편함을 줄이기 위해서 의족에 쇼크 업소버와 같은 충격 완화 장치를 부착하여 사용자의 피로감을 줄이고 오래 사용할 수 있도록 하고자 한다. 의족의 길이 조절과 관련하여 충격 완화 장치가 큰 부피를 차지하면 안되므로 작은 크기의 충격 완화 장치를 선택하는 것이 필요하고, 외관상으로도 혐오스럽지 않도록 하는 것이 중요하다. 그리고 충격 ∙ 진동 해석을 통해 충격 완화 장치가 잘 기능하는지 확인하여야 한다.
관련 기술의 현황
State of art
1) 센싱기술
기존 실리콘 의족과 스마트 의족의 가장 큰 차이는 센싱 기술이다. 현재 의족에 적용되는 센싱 기술에는 크게 두 가지가 있다. 첫번째로는 각도센서이다. 오르막길, 내리막길, 평지에서의 보행 상태가 각기 다르므로 의족 사용자에게 오르막길, 내리막길에 최적화된 보행을 제공할 필요가 있다. 따라서, 오르막길과 내리막길을 판단하기 위해 각도센서(기울기센서)를 발바닥 부분에 부착해 사용자가 어느 정도의 경사에 위치하고 있는지 파악한다. 두번째로는 압력센서이다.

[스트레인 게이지를 이용한 대퇴의지의 보행정보 획득 기법(엄수홍, 임영광, 유성봉, 이웅혁) 대한전자공학회 학술대회, 2016]을 참고하면 사용자의 보행상태를 발꿈치 닿기 (Hill Contact, 1단계) -> 발바닥 닿기 (Foot flat, 2단계) -> 중간 디딤 (Mid stance, 3단계) -> 발꿈치 떼기 (Heel off, 4단계) -> 밀기 (Push off, 5단계) -> 발가락 떼기 (Toe off, 6단계) -> 흔들기 (Swing, 7단계) -> 발꿈치 닿기 (Heel Contact, 8단계)와 같이 총 8단계로 정의하고 있다. 각 단계 별 발바닥에 가해지는 압력의 위치와 세기가 다르다는 점을 활용하여 의족 발바닥에 부착된 압력센서를 통해 얻은 데이터로 사용자의 보행상태를 파악한다. 또한, 오르막길과 내리막길 보행 시 압력센서를 통해 측정되는 데이터로 평지 보행인지, 경사 보행인지를 파악할 수 있으므로 각도 센서 역할도 한다.
2) 보행 보조 알고리즘
스마트 의족의 가장 큰 기능은 보행 보조 기능이다. 하지절단장애인들에게 단순 절단 부위의 외관을 대체하는 의족이 아닌 비장애인과 동일한 보행을 제공하는 것이다. 기울기센서, 압력센서를 통해 의족 사용자의 보행상태를 파악한 후 압력센서와 아두이노를 연동하여 모터의 회전속도와 각도를 조절한다. 즉, 사람의 발목관절을 한 개의 모터가 대체하는 것이다. 그러므로 모터의 제어가 매우 관건이라고 할 수 있다. 모터를 제어하기 위해 압력 센서, 기울기 센서, 자이로 센서 등 다양한 제어기법이 존재하지만 현재 모터를 제어하는 가장 발달된 기술은 정상 다리의 보행을 인식하여 그에 적합한 속도와 각도로서 모터를 제어하는 기법이다. 하지가 절단된 부분에 의족을 착용하고 의족에 탑재된 카메라가 절단되지 않은 즉, 정상보행을 하는 다른 한 쪽의 다리를 카메라로 인식한다. 정상 보행하는 다리의 움직임과 속도를 파악하여 의족에 달린 모터를 제어하여 절단되지 않은 다리의 보행을 구현하는 것이다. 이에 더 나아가 현재 외부에서 데이터를 받아 모터를 제어하는 수동적 제어가 아닌 근전도 센서를 이용하여 사용자가 의지적으로 의족을 제어하는 의지적 제어를 향한 노력이 진행되고 있다.
3) 충격 완화 설계

기존의 실리콘 의족은 절단부위와 의족 간의 접합 부분에서 발생하는 마찰로 인해 사용자의 피로 누적을 초래한다. 따라서, 실리콘 의족의 경우 평균 사용시간이 4시간을 넘지 못한다. 이러한 문제를 해결하고 사용 시간을 늘리고자 현재 의족에는 충격 완화 기술이 적용된다. 충격 완화 기술의 경우에 스프링 Damper를 사용한 방식, 공압 Damper 또는 유압 Damper가 적용된다. 2018년 12월, 한국기계연구원에서 출시한 스마트 의족에는 탄성력을 가진 댐퍼가 아닌 고탄성 탄소섬유 재질을 이용한 충격 완화기능을 적용하였다. 별도의 댐퍼가 없기 때문에 의족의 무게를 절감할 수 있고 구조를 단순화시킬 수 있다는 장점이 있다. 이처럼 현재 스마트 의족에 충격 완화 기능이 적용되어 사용자의 피로도 누적을 감소시켜 사용시간을 10시간 이상으로 늘렸다.
기술 로드맵
내용
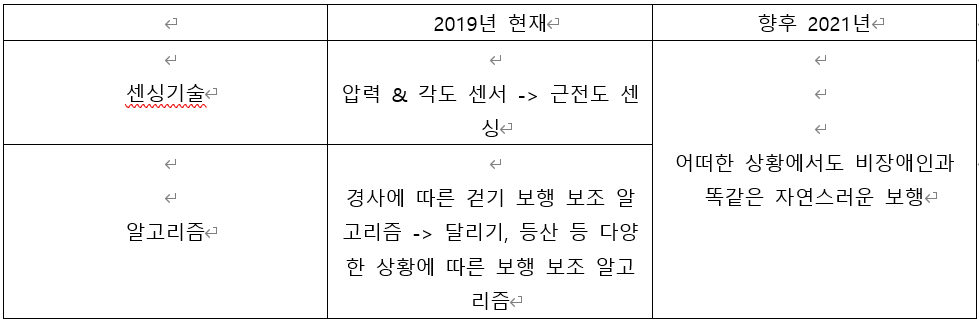

스마트의족의 기술 로드맵은 다음과 같다. 스마트 의족의 최종 목표는 어떠한 상황에서도 비장애인의 보행을 제공하는 것이다. 사람의 뇌파를 이용하여 의수를 제어하는 기술은 이미 소개된 바있다. 그렇다면 ‘뇌파로 의족을 제어할 수 있지 않을까?’란 생각을 해 볼 수 있다. 하지만 뇌파로는 의족을 제어하기 어렵다. 연구 결과에 따르면, 사람의 하체는 뇌파보다는 다리를 구성하는 근육 신경이 더 큰 역할을 한다고 한다. 따라서 뇌파가 아닌 절단부위에 살아있는 신경 세포를 이용하여 의족을 제어할 수 있는 ‘근전도 센싱’이라는 기술이 연구 중에 있다. 또한, 현재는 달리기를 위한 의족, 등산에 적합한 의족이 따로 존재하지만 상황 별로 다수의 의족을 구매하여 생활하는 것은 가격적인 부담으로 인해 사실상 불가능하다. 어떠한 상황에서도 적합한 단 하나의 의족을 만들기 위한 연구가 활발히 진행중이다.
특허조사
내용
특허전략
내용
관련 시장에 대한 분석
경쟁제품 조사 비교


마케팅 전략


마케팅 전략을 평가하는데 STP 마케팅 전략을 사용한다.
Segmentation(시장 세분화)의 경우 연령 무관, 성별 무관, 저소득층 및 고소득층으로 세분화할 수 있다. 길이조절 기능을 탑재하여 어린 아이가 성장해가면서 비싼 의족을 교체할 필요가 없도록 하기 때문에 연령이 무관하고 어떠한 사람의 하중을 버틸 수 있도록 안전계수를 5이상으로 설정하여 설계하도록 한다.
Targeting(주요 고객)의 경우 높은 가격으로 인해 의족을 보유하지 못한 하지절단장애인을 대상으로 한다. 또한, 성장이 지속적으로 진행되는 어린 아이에게도 적합하다.
Positioning(위치)의 경우 본 제품의 기술력은 국내와 해외의 주요 업체에 비해 떨어질 수 밖에 없다. 하지만 스마트 의족의 가장 큰 기능이라 할 수 있는 보행보조기능을 제공할 수 있도록 하고 현재 정확한 가격을 측정하긴 어렵지만 양산 가능한 제품을 설계하는 것이 목표이므로 타 제품보다 가격 경쟁력 면에선 확실히 우위에 있다고 판단할 수 있다.
개발과제의 기대효과
기술적 기대효과
내용
경제적 및 사회적 파급효과
내용
구성원 및 추진체계
내용
설계
설계사양
내용
개념설계안
내용
이론적 계산 및 시뮬레이션
내용
조립도
조립도
내용
조립순서
내용
부품도
내용
제어부 및 회로설계
마이크로프로세서 등을 사용한 제어부가 있는 경우에는 소조립도로부터 시작하는 제어부의 회로도가 있어야 한다.
가. 아두이노와 모터

발목 관절 제어를 위한 모터는 MG996r을 사용하였다. 모터는 4.8V에서 9.4kg/cm, 6.0V에서 11kg/cm까지의 토크를 만들 수 있다. 0도에서 180도까지 움직일 수 있으며, 아두이노 상에서 특정 각도로의 이동을 명령하면 내부 PID 제어를 통해 해당 각도로 이동한다. 서보 모터는 외부 전원에 연결되어 6.0V 전압에 연결하여 사용하였으며, 아두이노의 12번 핀에 연결하여 제어하였다.
나. 아두이노와 센서
보행상태를 측정하기 위해, 의족의 바닥 부분에 3선 로드셀을 부착하였다. 3선 로드셀은 2개를 한 세트로 HX711(Amplifier)에 연결되어야 한다. 3선 로드셀은 4개를 동시에 연결할 때는 풀 브리지로, 2개를 동시에 연결할 때는 하프 브리지 회로를 이용해서 연결을 해야 한다. 프로젝트를 위해서는 2개의 한 쌍이 필요하므로 하프 브리지로 연결하였다.


위 그림과 같이 하프 브리지를 이용해서 HX711에 연결하였고, HX711의 SCK, DT선은 아두이노에 연결하였다. 또한 여러 쌍의 센서를 사용해야했기 때문에, 전압은 외부 전원을 통해 입력하였다. 또한 3선 로드셀을 총 4쌍 연결했으며, 각각의 데이터를 입력 받기 위해 Serial in, Serial out 핀인 0번과 1번을 제외한 2~9번까지의 핀을 사용하였다. HX711에서 SCK핀에는 클럭 신호가 입력되고, DT핀에는 두 로드셀에서 측정된 압력 합의 데이터가 입력된다. 이러한 방식은 I2C 통신이며, 이를 통해 동기식 통신이 가능하다. 총 4쌍의 로드셀로부터 입력을 받아 의족의 각 위치에 따른 압력 값들을 얻을 수 있다.
소프트웨어 설계
스마트 의족은 정지 상태와, 보행 상태로 나뉘어지고 보행 중에는 보행 단계와 경사로를 파악하여야 한다. 발바닥에 부착된 4개의 센서를 통해 단계를 4단계로 분류하고, 이를 바탕으로 각 단계에 맞는 모터제어를 구현한다. 분류한 각각의 단계는 다음과 같다.

1) 보행단계 1단계

발 뒤꿈치에 있는 1번 센서에 압력이 가해졌을 때, 보행 1단계를 시작한다. 발바닥이 지면에 닿을 때까지 모터를 회전시키며 발바닥 중앙에 있는 2, 3번 압력센서가 지면에 닿으면 1단계를 종료한다.
2) 보행단계 2단계

발바닥을 지면에서 떼기 전에 다리가 움직인다. 발목과 발의 각도가 감소하고, 발목과 발의 각도가 특정한 값에 도달하면 2단계를 종료한다.
3) 보행단계 3단계

발바닥에 가해지는 압력이 발 앞꿈치로 이동한다. 모터를 회전시켜서 지면을 밀어주며, 발바닥에 위치한 2, 3번 센서가 지면에서 떨어져 압력이 감지되지 않으면 3단계를 종료한다.
4) 보행단계 4단계

발바닥이 지면에서 떨어져 다음 보행단계를 준비하며, 발목과 발의 각도를 처음과 같은 상태로 되돌린다. 발 앞꿈치의 4번 센서에서 압력이 측정되지 않으면 지면에서 발이 떨어진 것으로 판단하고 모터를 움직인다. 이후 발 뒤꿈치의 1번 센서에서 압력이 측정되기 전 까지를 보행단계 4단계로 한다.

평지대비 경사로에서의 지면 반발력 크기를 고려하여 발 뒤꿈치에 위치한 센서에서 측정한 압력을 기준으로 5% 정도 더 크게 측정되는 경우에 오르막길로 판단하고, 발목 제어 범위를 작게 한다. 그리고 20%정도 더 작게 측정되는 경우에는 내리막길로 판단하여, 발목 제어 범위를 크게 한다. 또한 개개인의 몸무게에 따라서 센서가 측정하는 압력에 차이가 발생하기 때문에 똑바로 서 있을 때 발바닥에 위치한 센서에서 측정한 값을 기준으로 사용자에게 맞는 압력을 확인한다. 그에 맞춰서 사용자에게 맞는 압력 범위를 적용하고 모터의 움직임을 제어한다.

위와 같은 알고리즘을 통해서 소프트에어가 작동하게 된다.
자재소요서
내용
결과 및 평가
완료작품 소개
프로토타입 사진
내용
포스터
내용
특허출원번호 통지서
내용
개발사업비 내역서
내용
완료 작품의 평가
내용
향후평가
내용
부록
참고문헌 및 참고사이트
내용
관련특허
내용
소프트웨어 프로그램 소스
내용