9조
프로젝트 개요
기술개발 과제
국문 : 욕창 방지와 불면증 치료 침대
영문 : Pressure sore prevention bed
과제 팀명
노인을 위한 나라는 있다
지도교수
권** 교수님
개발기간
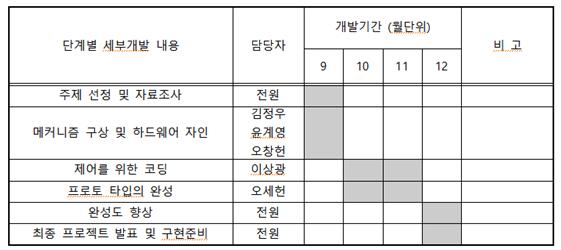
2018년 9월 ~ 2018년 12월 (총 4개월)
구성원 소개
서울시립대학교 기계정보공학과 20114300** 김**(팀장)
서울시립대학교 기계정보공학과 20114300** 윤**
서울시립대학교 기계정보공학과 20114300** 오**
서울시립대학교 기계정보공학과 20114300** 오**
서울시립대학교 기계정보공학과 20114300** 이**
서론
개발 과제의 개요
개발 과제 요약
욕창이란 오랜 시간 동안 우리 몸의 한 부위에 압력이 지속적으로 가해져 혈액순환이 잘 되지 않아 해당 부위의 조직이 죽어 발생하는 상처를 의미한다. 이를 예방하기 위해서는 침대에 누워있는 자세를 주기적으로 바꿔줘야 하는데, 스스로 몸을 잘 움직이지 못하는 노인환자의 경우 욕창 발생에 매우 취약한 상태가 된다. 우리가 만들고자 하는 욕창 방지 침대는 주기적으로 침대를 기울어 지도록 하여 환자의 체압을 분산시키고 체위를 변경시키기 쉽도록 하여 욕창을 방지할 수 있도록 한다.
개발 과제의 배경 및 효과

요양병원 면회가 금지된 사이 병원의 관리 소홀로 피해를 입었다고 호소하는 보호자들이 늘고 있다. 최근 청와대 국민청원 게시판에도 면회가 금지된 기간 동안 요양병원에서 관리를 부실하게 해 입원환자의 상태가 악화됐다는 내용의 글이 다수 올라와 관심을 받기도 했다.
5월 게시글을 올린 한 청원인은 “면회금지 기간 동안 할머니가 병원에서 방치됐다”며 “코로나19 이후 면회가 금지되고 간병인이 바뀌었고 이후 요양병원으로부터 큰 병원으로 옮기라는 연락을 받았다. 병원에 가보니 할머니 몸에 욕창이 생겨 꼬리뼈까지 보이는 상황이었다”며 요양병원 내 CCTV 설치를 주장하기도 했다. 이와 같이 병원의 관리 소홀을 방지하고 소중한 사람의 건강을 걱정하는 사람을 위해서 우리 팀은 체위 변경 침대를 아이디어로 채택했다.
(2) 제품의 효과
욕창을 방지하기 위해서는 간병인이 환자의 몸을 옆으로 돌리기 위해서 많은 체력을 써야 하는데 침대 자체적으로 기울어진다면 환자의 체중은 등에서 옆면 쪽으로 더 실릴 수 있게 된다. 그래서 등 부위의 지속적인 체중 압력이 감소되어 혈액 순환이 더 잘 일어난다.
개발 과제의 목표와 내용
(1) 개발 목표
보다 효율적으로 욕창방지를 할 수 있도록 침대를 회전시킬 수 있도록하여 환자의 체압을 분산시킬 수 있도록 한다. 침대가 과도하게 회전할 경우에는 낙상의 위험이 있으므로, 제어를 통해 침대의 기울기 최대치를 정하고 기울기의 최대치는 이론적인 계산을 통하여 설정하도록 한다.
(2) 개발 내용
- (가) 풀리, 타이밍벨트와 모터제어 파트
- 타이밍벨트와 풀리를 이용하여 모터로 침대 프레임을 움직이게 하여 침대 매트리스가 기울었을 때 환자의 체위를 손쉽게 바꾸기 위한 보조 기구를 제작한다. 또한 각 모터의 on/off를 제어하기 위한 제어기구를 제작한다. 또한 속도가 빠를 필요가 없기 때문에 속도의 제약은 거의 없다.
- (나) 전자시스템 제어를 위한 리모컨
- 전체적인 시스템 제어를 위해서 리모컨을 제작한다. 유무선 관계가 없다. 혹은 블루투스 통신을 통해 리모컨이 아닌 각자 휴대폰으로도 제어가 가능하도록 한다.
- (다)하드웨어 구성
- 현재 보급된 병원용 침대에 추가 부품의 개념으로 설계한다. 침대 프레임 혹은 매트리스를 회전시키기위한 Shaft(축)과 기어박스를 침대 하단부에 장착할 수 있도록 한다. 그리고 아두이노를 통한 제어부를 제작하여 기어박스에 제어부와 모터가 같이 들어갈 수 있도록 한다.
관련 기술의 현황
State of art


높낮이 조절이 가능한 동시에 침대 전체를 일정한 각도만큼 기울이는 기능을 구현했다. 베이스 프레임에 두 개의 슬라이딩 조인트를 설치하면 2자유도만으로도 각각의 운동이 가능하다. 압력을 분산시키기 위해 환자의 체위를 일정 시간마다 일정한 각도로 바꾸어 주도록 하였고, 기존의 침대에 사용되는 기능 또한 최소한의 자유도로 구현되도록 하여 5자유도로 7가지의 운동을 하는 침대 기구를 설계하였다. 리니어 모터가 수직으로 연결된 바를 밀고 당기면서 침대 프레임이 기울어 지는 방식으로 메인 프레임에 좌우로 기울어지는 기능, 베이스 프레임에 앞뒤로 기울어지는 기능으로 2층으로 구성되어 있다.
리모콘을 조작하여 상반신과 하반신의 높이를 조절할 수 있고, 침대의 길이방향 중심에서 좌우측을 기울여 환자의 압력을 분산시켜 줄 수 있다.
기술 로드맵

특허조사

본 발명은 사용자의 신체 부위에 따라 머리, 상체, 둔부, 다리의 섹션으로 구획하여 각각의 섹션의 양측에 팽창 및 수축에 의해 동작하도록 에어챔버와 에어공급수단 및 에어챔버로의 에어공급과 배출을 제어하는 동작 선택 제어부를 포함한다. 제어부는 에어챔버로 에어를 공급함과 아울러 에어를 배출시키기 위하여 에어공급수단이 에어공급라인에서 제 1 및 제 2 에어챔버(120,130) 각각에 연결되는 3방향 밸브(161,162)를 마련하여 선택적으로 공급할 수 있고 채워진 에어를 사용자의 체중에 의한 가압에 의해 배출시킬 수 있도록 한다.
patent specification: KR101066948B1 inventor: 신철, 홍정화

본 발명은 환자가 의료용으로 사용하는 전동침대에 관한 것으로, 특히 침대의 상판이 좌우 일정한 경사각으로 작 동되게 함으로서 환자의 체위변경이 자동으로 이루어져 욕창이 방지될 뿐 아니라, 침대의 승하강을 쉽게 제어함 으로써 적절한 높이와 자세로서 간병을 할 수 있도록 한 욕창방지용 전동침대에 관한 것이다.
대한민국특허청(KR) 공개특허공보(A) 출원번호 10-2011-0104701 출원인 김진일
특허전략
기존에 있는 특허기술들을 보면 에어챔버와 같은 매트리스를 이용한 것과 침대 프레임을 기구학적으로 변형하는 것이 대부분이다. 우선 에어 매트리스의 경우 공기주입 부분의 소음으로 불편할 수 있으며 위생적으로도 공기 셀 부분 청소가 어려운 점과 터지지 않도록 주의해야 하며 비닐 소재 특성상 영구성의 문제가 있다. 그리고 특허(1)에서 각각의 에어챔버가 제어부에 알고리즘 혹은 타인에 의해 조작되는데 이는 자칫하면 골격이 틀어지는 문제가 발생할 수 있다. (환자에 대한 정보나 안전교육이 충분하지 않을 경우) 특허(2)는 우리가 제시한 모델과 같이 구조적으로 침대 프레임 자체를 기울이는 방식으로 리니어 액추에이터 2개를 이용했는데 우리는 정중앙 기어박스 풀리에 타이밍 벨트를 사용하여 전동모터를 외부에 부착하는 방식으로 더욱 간단하고 직관적이어서 교체 및 보수가 편하다. 그리고 진동을 사용한 추가 기능이 있으며 기존 병원 침상과 호환하는데 목표를 두고 있다.
관련 시장에 대한 분석
경쟁제품 조사 비교

우리나라에서 욕창환자들이 보통 많이 쓰는 제품은 교대부양과 틸팅 기능이 있는 에어 매트리스인데 공기펌프로 특정 셀에 주입했다 뺐다를 반복하여 사용자의 체압을 분산시킨다. 이 제품을 써서 욕창 개선에 효과를 봤다는 사람들 평이 많이 있었으나 공기 펌프 소음 때문에 불편하고 장기간동안 사용했을 시에는 공기 펌프 압력이 줄어들거나 공기가 들어있는 비닐 소재가 늘어나는 등 복원력에 문제가 있어 오래가지 못한다는 의견이 있었다. 혹시라도 관리 소홀로 터지게 된다면 그 부분만 수리할 수 없기 때문에 전체를 다 갈아야 하는 문제가 있다. 초기 구매 비용은 더 저렴하지만 장기간 사용하는 사람들은 유지비용이 많이 들어갈 수 있다. 수년 간 관리가 들어가야 하는 욕창 환자 특성상 에어 매트리스 보다는 침상프레임이 구조적으로 기울어지는 것이 수명설계만 잘 한다면 영구적으로 쓸 수 있고 모터 부분이라던지 여타 구조물은 고장난다 하더라도 개별적으로 교체가 가능하기 때문에 유지 비용이 덜 나간다.
마케팅 전략
- SWOT 분석

개발과제의 기대효과
기술적 기대효과
◇ 새로운 기술을 개발하는 것이 아닌 상용화 되어 있는 기술을 활용한다. 호환성, 부품 대체성, 수리 비용 절감, 가격 경쟁력 부분에서 우위를 점할 수 있다.
◇ 디자인 부분을 수정한다면 향후 신생아용 욕창방지 침대를 제작할 수 있을 것이다.
◇ 기존 사용되는 매트리스의 경우 지속적인 공기 공급으로 인한 소음이 심하여 사용자에게 불편함을 줬지만 개발하려는 메트리스의 경우 일정 주기마다 모터가 동작하면 되는 것이기에 소음 감소효과를 기대할 수 있다.
◇ 의료, 간병인의 체력적 부담을 직접적으로 줄여줄 수 있으리라 기대된다.
◇ 두께의 제약이 있기 때문에 복잡하고 다양한 메커니즘은 적용하지 못하지만 누워있는 상태의 환자 등에 물리적 자극을 줄 수 있다.

◇ 흔들 침대의 기능을 통해 불면증 환자에게 숙면에 도움을 줄 수 있다. 아래의 그림에서도 확인할 수 있다시피 60대 이상 노인의 불면증 환자가 10% 이상을 기록하고 있다. 노인의 5명 중 1명은 불면증을 가지고 있다는 것이다. 불면증은 노인의 몸을 더욱 취약하게 만들기 쉬운데, 이런 불면증 치료를 위해 주기적으로 흔들어주는(진동수 0.25Hz) 기술을 침대에 넣은 것이다. 스위스 제네바대학의 소피 스워츠 교수의 연구에서는 ‘고정침대에서보다 흔들침대에서 잠을 잔 사람이 더 빨리 숙면 상태에 도달했으며, 눈동자의 움직임도 더 안정적인 것으로 나타난다’ 라고 결론을 내렸다. 이런 연구의 결과로도 알 수 있다시피 주기적으로 흔들어주는 기능은 불면증 치료에 매우 효과적인 영향을 줄 수 있다는 것을 보여준다.
경제적 및 사회적 파급효과
◇ 인두제 방식의 의료수가 지불 방식은 환자가 어떤 치료를 받든 간에 환자 한명 당 동일한 액수의 돈을 지급하게 만듬으로 병원의 진료 동기를 악화시키고 자발적인 관리를 기대하기 어려운데 기구를 도입하여 그 효과가 검증된다면 고객의 수요에 따른 경쟁적 시스템으로 널리 보급될 가능성이 있다. 또한 치료사의 근무 환경이 개선되어 더 좋은 의료 서비스를 기대해볼 수 있다.
◇ 앞서 기술적 측면에서도 언급했다시피 기존의 의료용 침대에서 욕창 방지를 위해 자세를 바꾸어주고 주기적으로 관찰 보호에 필요한 인력이 보다 줄어들게 된다. 따라서 간병에 투자되는 금액을 줄일 수 있다.욕창 관리에 드는 시간을 줄여서 간호 시간을 효율적으로 사용할 수 있으며
◇ 노인환자의 욕창 방지를 위해 환자를 간호사나 간병인이 환자를 힘으로 체위를 바꾸어 줘야 한다. 기존의 의료용 침대에서는 환자의 체위를 바꾸어 주는 데 많은 힘이 들고 또한 시간도 많이 든다. 하지만 우리 팀에서 개발하는 의료용 침대를 사용할 경우 주기적으로 좌우로 침대를 약간씩 기울게 해서 압력을 분산시켜서 체위 변경 시간주기가 기존 2시간보다 더 늘어날 수 있다. 그리고 등을 두드려주는 임펄스 기기가 환자 가래 배출을 도와준다면 기도까지 석션을 하지 않아도 되기 때문에 기도부분을 보호할 수 있고 석션에 드는 고생을 기존 보다 줄여주어 의료진에게 더욱 편한 근무환경을 만들어 줄 수 있다.
구성원 및 추진체계
- 가. 개발 일정

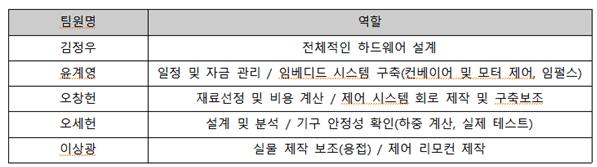
- 나. 구성원 및 추진체계

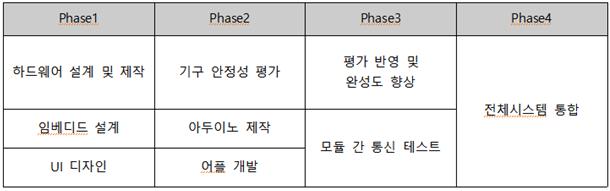
- 다. 전체 추진 계통도

설계
설계사양
- 가. 제품요구사항


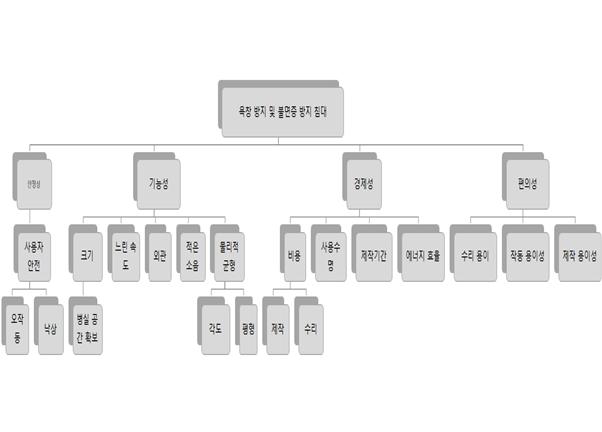
- 나. 목적계통도

- 다. 평가내용
- (1) 설계사양 도출
- 모터 - 1마력 정도의 모터 사용
- 작동원 - 220v 교류 전력 이용
- 구동축 - 용접 가능하고 굵은 축 사용
- 침대프레임 - 기존의 제품과 동일하게 플라스틱 재질로 사용
- 재료 – 스틸, 플라스틱
- 기타부품 - 아두이노 컨트롤러 타이밍 벨트
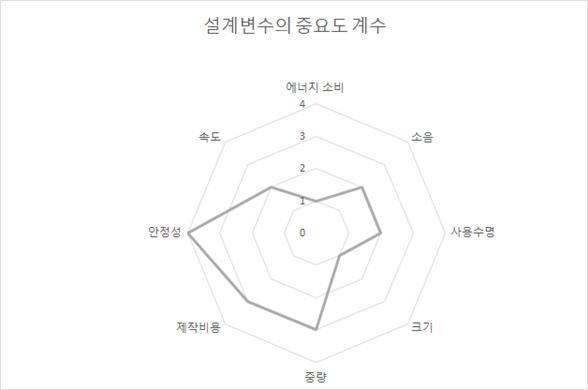
- (2) 설계변수의 중요도 계수
- 안정성 > 제작비용 = 중량 > 속도 = 소음 = 사용수명 > 에너지 소비 = 크기

개념설계안
- 가. 접는 모델

- 나. 각도 조절 모델

- 다. 그 외
- 기어 모델, 캠 모델, 바 모델, 리니어 액츄에이터 모델, 피아노 건반식 모델, 슬라이딩 조인트 모델, 공기펌프를 이용한 모델
이론적 계산 및 시뮬레이션
- 가. 감속기어모터의 사양

- 감속비 212, 정격속도 32rpm, 정격토크 100kgf*cm
- 기어비 5:1 기어풀리를 설치하여 속도를 5배 낮추고 토크를 5배 상승시킬 수 있다.
- 기울기 30도까지 올리는데 드는 시간: 60초*5/(32rpm*12) = 약 0.78초
- 나. 모터 축의 최대 토크 계산
- 병원 매트리스 두께 10cm로 가정하고 기울기 최대 각도인 30도까지 상승했을 때 사람의 몸무게 100kg을 집중하중으로 계산하면 다음과 같다.
- mgsin(theta) = 100/2 kgf = 50 kgf
- 매트리스의 두께를 10cm로 가정했으므로 모터의 축에 걸리는 토크는 다음과 같이 계산할 수 있다.
- (50 kgf) * (10cm) = 500kgf*cm
- 따라서 우리가 채택한 모터와 기어풀리로 기울기 30도까지 돌렸을 때의 토크를 감당할 수 있다.

- 다. 미끄러지지 않는 침대 최대 기울기(각도) 계산
- mgsin(theta) = Amgcos(theta) (A는 정지마찰계수)
- A = mgsin(theta)/mgcos(thata) = tan(theta)
- 위 계산식을 통해서 계산해보면, 기울기가 최대 30도 일 때 정지마찰계수는 약 0.577라는 값을 가진다.

- 섬유의 마찰계수는 면이 0.22에 해당하기 때문에 기울기 30도를 이용하고자 할 때에는 속박할 필요가 있다. (사용자 맞춤형 폼 제작 필요) 환자를 속박하지 않고 틸팅 기능을 사용하려면 미끄러지지 않는 기울기는 약 12도이다. 우리는 프로토 타입으로 제작하기 때문에 미끄러지는 것에 대한 속박까지는 고려하지 않았다
조립도
조립도
- 가. 기어 박스 조립

- 기어 박스를 미리 제작한 후

- 작은 풀리와 바벨 기어를 조립한 것을 배치한다.

- 기어 박스안에 아두이노 및 회로를 설치한다.
- 나. 기어풀리, 샤프트, 벨트, 하부 판넬 조립

- 큰 풀리와 타이밍 벨트를 조립한다.
- 하부판넬의 내부 빈 공간에 큰 풀리, 벨트를 집어 넣고 큰 풀리에 축을 끼운다.
- 다. 하부 판넬, 기어박스 조립

- 이전에 조립했던 기어박스와 하부 판넬을 조립한다.

- 라. 사이드 바 조립 순서

- 메인 바 위에 낙상방지 용 난간과 다리를 설치한다.

- 구매한 바퀴를 다리에 부착한다.

- 마. 상부 판넬과 매트릭스 받침 프레임 조립

- 상부 판넬의 홈에 맞게 매트리스 받침 프레임에 축을 꽂아 조립한다.


- 바. 매트리스 받침 프리임과 리니어 엑츄에이터 조립

- 이전에 조립한 프레임과 고정을 위한 리니어 엑츄에이터를 조립한다.
- 사. 프레임과 사이드 바 조립

- 상부 판넬에 있는 홈에 맞춰서 사이드 바를 양쪽으로 조립한다.

- 아. 하부 판넬과 프레임을 조립

- 홈에 맞춰 하부 판넬과 프레임 조립을 통해서 완성품을 제작한다.

- 큰 풀리에 축을 꽂아주면 완성된다.
부품도
- 가. 바벨 기어(구매) L = 52.6 mm



- 나. 리니어 엑츄에이터 (구매) 스트로크 = 100mm



- 다. 바퀴 4개(구매)


- 라. 매트리스 받침대(구매)


- 마. 침대 싱글 프레임 (구매)

- 바. 타이밍 벨트 (구매)

- M8규격으로 HTD 2세대 벨트를 사용하기로 했습니다. 1세대의 경우 소음과 동력전달능력, 사용기간이 짧아 2세대로 구매하였습니다. 총 잇수는 830개입니다.

- 1세대와 2세대 벨트의 치형 차이

- 5M 규격의 타이밍 벨트, 풀리의 규격에 따라 원동차 잇수 32, 종동차 잇수 95로 구매했습니다.

- 규격표와 직경 계산시 동일함을 알 수 있습니다.
- 사. 타이밍 벨트 풀리 종동부 (구매)

- 아. 타이밍 벨트 풀리 원동부 (구매)

- 자. 기어박스 (제작)

- 차. 사이드 바 하단 부 (제작)

- 카. 사이드바 상단 부 (제작)

- 타. 사이드바 봉 (제작)

- 파. 상단 판넬

- 하. 하부 판넬

- 거. 하부 판넬 하부 커버

- 너. 축 키 (외주)

제어부 및 회로설계
- 가. 모터 회전부 제어
- [ 제어부의 구성품 ]
- 우리팀의 제품을 만드는 부분에서 모터를 제어하기 위한 제어부가 필요합니다. 이를 위해서 우리팀은 아두이노와 모터드라이버(DMD-150), 엔코더 모듈, smps 그리고 스위치를 이용하여 모터를 제어할 예정입니다. 아래의 표는 우리팀이 사용하는 보드와 모터드라이버, 엔코더 모듈의 상세 스펙(사양)입니다.

- [모터드라이버를 연결한 회로 구성]
- 1. 전원 입력
- [모터드라이버를 연결한 회로 구성]

- 모터 드라이버를 작동하기위해서는 전원을 입력해 주어야 합니다. 위 그럼과 같이 DC9V ~ 36V에 전원의 양극(+)를 연결하고 PGND에 전원의 음극(-)를 연결합니다. 이 때 전원 공급 장치 양극 및 음극은 바뀌면 안되니 전원 공급 장치에 20A 퓨즈를 연결할 것입니다.
- 2. DC 모터 결선

- DC 모터의 연결은 위의 그림과 같이 OUT1,OUT2에 DC 모터 2선을 연결할 예정입니다.
- 3. 제어신호결선

- 제어 신호는 아래의 그림과 같습니다. 접점 신호로 제어시 PWM선과 5VO(Out)을 쇼트 시켜 IN1과 연결하면 정방향, IN2와 연결하면 역방향으로 회전하게 된다. 상위 MCU(Arduino UNO)로 PWM 속도제어해야 하므로 COM 단자는 GND와 연결하며 5VO는 5V 신호 출력 단자이고, 5V PWM 신호는 PWM단자에 연결할 것이다. 그리고 IN1은 방향 제어(Direction), IN2는 기동/정지(Brake)를 담당하고 있다. 전체적인 제어 로직은 아래의 표와 같고, 0은 Low, 1은 High를 의미하고, X는 임의 레벨이고 플로팅(Floating)은 Low을 의미한다.

- 4. 회로도
- 아래 그림은 Arduino UNO, 모터드라이버(DMD-150) 그리고 전원 공급을 위한 Power Supply(SMPS)과 스위치를 이용하여 모터를 제어하는 회로도를 나타낸 그림이다. 우선적으로 모터드라이버의 사용을 위해서 SMPS를 모터드라이버에 연결하여 모터드라이버에 전원이 연결되도록 한다. 그 후 모터드라이버(DMD-150)가 Arduino UNO로 부터 신호를 받을 수 있도록 IN1,IN2을 아두이노의 IO핀중 7번핀과 8번핀을 연결시키고 모터의 속도를 PWM을 통하여 제어를 해야하기 때문에 Arduino UNO의 IO핀중 PWM을 사용할 수 있는 9번핀을 이용하여 연결해준다. 아래의 표는 모터드라이버와 Arduino UNO의 핀 연결을 정리하여 표시해 놓은 것이다.


- 이렇게 연결하게 될 경우 모터드라이버는 Arduino UNO의 명령을 받을 수 있는 상태가 된다. 그런 다음으로 모터드라이버를 통해 모터가 움직이도록 하기위해서, 모터드라이버의 출력(OUT) 핀으로부터 모터와 연결시켜준다. 추가적으로 Arduino UNO와 드라이버 사이에 리모콘과 수광 다이오드를 사용함으로써 스위치를 이용하여 제어를 추가적으로 할 수 있도록 설계하였다.
소프트웨어 설계
- 가. 프레임 회전제어
- 앞에서 보여준 회로도처럼 회로를 완성했다면, 모터를 원하는 만큼 제어를 하기위한 코딩이 필요하다. 우리팀은 Arduino UNO를 통해 제어하므로 아두이노 소프트웨어인 IDE를 사용하여 코딩을 한 후 제어를 하였다. 욕창 방지를 하기위해 효율적인 각도 또한 앞의 이론적 계산부분을 통해서 계산하였기 때문에 이 결과를 토대로 작성하였다. 이번 코딩을 하면서 주의해야할 부분은 모터드라이버에 PWM 100%일 때 시간지연 없이 그대로 사용할 경우 역기 전류가 발생하기 때문에 0.1초 정도의 시간지연이 필요하다는 점이다. 이를 고려하여 코드를 작성하면 아래와같이 코드를 작성해 볼 수 있다. 아래 코드를 통해서 모터가 리모콘 신호를 통해서 움직이고 제어되게 된다. 리모콘의 왼쪽 화살표 버튼을 누를 경우 모터는 반시계 방향으로 일정한 각도만큼 움직이게 된다. 반대로 오른쪽 화살표 버튼을 누르게 될 경우 모터는 시계 방향으로 욕창방지를 효율적으로 할 수 있도록 하는 각도만큼 움직이게 된다. 이를 통해서 환자의 욕창방지를 기존보다 쉽게 해결할 수 있다.

자재소요서

결과 및 평가
완료작품 소개
프로토타입 사진


위의 사진은 저희조에서 만든 욕창 방지 의료용 침대의 프로토타입 사진입니다. 기어박스를 철판을 이용하여 프레임에 용접을 하였고, 모터의 진동을 최소화 하기위해서 폼 테이프와 얇은 철판을 이용하여 모터 하우징을 제작하였습니다. 그리고 낙상방지 사이드바 대신 침대 깔판의 회전을 물리적으로도 제어 할 수 있는 하단의 안전 바를 설치하였습니다.
포스터

위 그림은 우리조에서 만든 제품을 설명하는 포스터입니다. 주요 내용으로는 개발 과제의 동기 및 개요, 개발과제 목표, 설계변수 중요도 계수 및 요구사항, 기구 설계의 메커니즘, 구성원의 추진체계, 기대효과, 조립도, 자재소요서 그리고 마지막으로 완료 작품의 평가가 있습니다. 앞에서 설명한 내용을 전체적으로 정리해 놓은 것으로 저희 조에서 만든 제품의 특징등을 한 눈에 알아 볼 수 있습니다.
특허출원번호 통지서

개발사업비 내역서

완료 작품의 평가

향후평가
우리 팀이 제작한 제품에 대한 향후평가는 총 3가지의 관점을 통해서 평가해 보았습니다. 3가지의 관점은 각각 ‘지속가능성’, ‘안정성’, ‘경제성(가격 대비 효율성)’입니다.
- 가. 지속가능성
- 지속 가능성이란 일반적으로 다음 세대가 자신들의 필요를 충족하는 능력을 희생하게 하지 않으면서 현세대의 필요를 충족하는 정도를 나타낸다. 우리 팀의 제품에서 사용되는 것은 오로지 일반적인 가정과 병원에서 사용하는 220V의 전압만을 사용한다. 따라서 제품을 사용하는데 있어서 환경적 그리고 생태학적으로 영향을 주는 부분이 없다고 판단되어 지속가능성 관점에서는 큰 점수를 받을 수 있다고 평가하고 있다. 그리고 구성되는 재료 또한 미관상을 위한 나무나 또는 화학물질을 이용한 코팅 등이 없고, 사용되는 철들은 잡철로 재활용이 가능하다고 판단하여 지속가능성 부분에서 높게 평가하고 있습니다. 이러한 부분에서는 향후에 별다른 변화없이 사용해도 좋다고 판단하였습니다.
- 나. 안전성
- 안전성이란 안전한 또는 안전을 보장하는 성질을 뜻한다. 우리팀에서 제작한 제품은 병원에서 환자들이 사용할 의료용 침대를 만든 것으로 다른 두 관점에 비해서 비중이 가장 높은 평가 관점 부분이다. 우리팀은 이러한 비중을 고려하여 제작을 할 때에도 안전성을 중점에 두고 제작을 하였습니다. 환자들의 최대 허용하중을 늘리기 위해 그리고 안전하게 침대를 돌릴 수 있도록 기어비를 3:1로 제작하였고, 환자들의 하중을 받고 회전하는 힘을 전달하는 SHAFT를 AL재질로 직경 25mm인 중실봉을 사용하였습니다. 그리고 안전한 깔판의 회전 제어를 위해 인코더를 사용하였습니다. 그리고 모터박스에서 모터의 진동으로 제품에 지장이 가지 않도록 스펀지와 폼 테이프를 사용하여 하우징을 제작함으로써 안전성 부분에서 많은 신경을 썻습니다. 하지만 안전성이 조금 부족한 부분이 있다고 판단되는 부분을 찾아보면, 첫 번째로는 낙상으로부터의 위험입니다. 침대 매트릭스와 환자복의 마찰계수를 직접 실험해 보지 않고 일반적으로 사용되는 섬유의 마찰계수를 사용하여 침대의 최대 기울기를 계산하였기 때문에 실제와의 차이가 발생한다고 생각하여 이러한 부분에서 안전성의 문제가 발생한다고 판단하였습니다. 하지만 이러한 부분 또한 사용된 마찰계수의 값이 실제 마찰계수보다 작은 값을 사용했다고 판단하여 크게 문제가 될 부분은 아니라고 생각합니다. 두 번째로는 제어의 정확성입니다. 엔코더의 정확성 문제가 발생할 경우 제어가 크게 문제가 발생한다고 판단하였지만, 이를 대비하여 침대 아래 부분에 물리적으로 각도를 제한할 수 있는 부분을 설치하였기 때문에 괜찮다고 생각합니다. 이러한 부분을 향후에 개선하기만 하면 좀 더 완성도 높은 좋은 제품이 될 수 있다고 판단됩니다.
- 다. 경제성(가격 대비 효율성)
- 경제성이란 한정된 자원의 효율적 사용 여부를 나타내며, 공공투자사업의 편익(benefit)과 비용(cost)을 측정하여 분석하는 관점입니다. 기존에 사용되는 ‘환자용 1단 수동침대’ 또는 ‘환자용 1단 전동침대’와 같은 경우 현재 판매되는 소비자 가격은 각각 540,000 ~ 890,000원과 880,000 ~ 900,000원이다. 우리팀에서 제작한 의료용 침대의 경우 앞의 개발 사업비 내역서에서도 확인할 수 있다시피, 총 제작에 사용된 금액은 526,870원이다. 원가와 소비자 가격에는 큰 차이가 있기 때문에 저희가 만든 제품의 마진율을 30%라고 가정한 후, 우리팀이 만든 제품의 소비가 가격을 계산하면 다음과 같이 계산이 된다.

- 위 가격은 현재 판매되고 있는 1단 수동침대의 최저가격보다는 비싸다고 판단되고, 1단 전동침대의 최저가격에 비해서는 저렴하다고 판단됩니다. 경제성에서 좀 더 보완을 하기 위해서는 사용되는 축을 충실봉 대신 중공봉을 사용하고 침대 프레임의 자체 제작과 풀리 크기의 최소화를 통해 원가를 절감시키게 될 경우 보다 저렴한 가격에 욕창방지가 가능한 의료용 침대를 판매 할 수 있다고 생각됩니다.
부록
참고문헌 및 참고사이트
1. 욕창 방지용 침대의 기구학적 설계, 대한기계학회 기타 간행물, 1305-1310
- ( 출처 : 권진욱, 심창섭, 박세환, 임득재, 이남기, 삼재경, 홍정화 (2002) )

2. 사용자 분석을 통한 욕창방지 베드의 디자인 개선, 대한인간공학회 학술대회논문집 160-164
- ( 출처 : 정광태, 강병기, 송복희, 신현봉, 전수호, 전경진, 원병희 (2008) )

3. 욕창방지시스템 기반기술 개발 보고서, 국립재활원 재활연구소, 연구IS-11-10-08
- ( 출처 : 장경배, 김희연 (2009) )

4. 욕창예방을 위한 올바른 자세와 이동방법 안내(척수손상환자용)
- (출처 : 유튜브 – HealthBreeze)

5. 일 병원 간호사의 욕창 간호지식과 간호중재 수행 및 인식에 관한 연구
- ( 출처 : 연세대학교 보건대학원, 병원경영학과, 진인선 (2009) )

관련특허
1. 욕창 방지장치(KR101066948B1)

[요약]
본 발명의 욕창 방지장치는 사용자의 신체 부위에 따라 머리, 상체, 둔부, 다리의 섹션으로 구획하여 분리구성된 매트리스와, 매트리스의 각각의 섹션의 양측에 팽창 및 수축에 의해 동작하도록 각각 마련되는 제 1 및 제 2 에어챔버와, 각 에어챔버가 팽창되도록 에어를 공급하는 에어공급수단과, 에어챔버 중 어느 하나를 동작시키거나 교대로 동작시키도록 선택하는 동작선택부와, 선택된 동작을 동작시키도록 에어공급수단 및 에어챔버 각각으로의 에어 공급과 배출을 제어하는 제어부와, 각각의 에어챔버가 초기로부터 동작하기 시작하는 시간을 설정하는 동작시간설정부를 포함하되, 매트리스를 다수의 섹션으로 분리함에 따라 이동이 편리하고, 체압이 집중되는 매트리스의 둔부 섹션에는 도넛형의 구멍이 형성되어 환부에 대한 접촉면을 줄이면서도 통기성을 좋게 하고, 머리 섹션에는 사용자의 신장을 측정할 수 있도록 줄자를 포함하고, 에어챔버의 각각은 피팅 오픈에 의해 급속배기가 가능하며, 제어부는 에어챔버의 각각에 공급된 공기의 압력을 측정하여 사용자의 체중을 환산함에 따라, 환자의 영양상태를 용이하게 파악할 수 있다.
2. 욕창방지침대(KR20190072755A)


[요약]
개시되는 욕창방지침대는, 에어 매트리스와, 압력 제어시스템를 포함하는 욕창방지침대로서, 상기 에어 매트리스는 상기 에어 매트리스의 상부와 하부를 상호 잡아당겨서 상부면을 평평하고 균일하게 제공하기 위해 상기 에어 매트리스의 각각의 측면에 복수 개의 섬유사를 구비하고, 일측에 욕창방지부를 가지며, 상기 압력 제어시스템은 상기 에어 매트리스의 외측에 상기 에어 매트리스와 분리하여 고정 설치되고, 상기 욕창 방지부의 굽은 형상을 제어하며, 욕창방지부는 다수의 일련의 공기셀 및 상기 다수의 일련의 공기셀을 일련의 에어셀로 각기 구획하기 위한 구획부를 포함한다.
3. 욕창 방지 장치(KR101576594B1)


[요약]
욕창은 오랫동안 피부에 지나친 압박이 가해져서 조직손상이 발생하는 것이므로, 욕창 예방의 가장 중요한 사항은 최소 두 시간 이내에 자세를 변경하여 신체에 압력이 가해지는 부위를 변경시켜 주는 것이다. 따라서, 본 발명의 일 실시예에 따르는 욕창 방지 장치는 천장을 바라보며 누워 있는 사용자의 자세를 등을 보인 채 옆을 바라보며 눕게 되는 자세로 변경시킴으로써 압박이 오랫동안 가해진 부위의 혈액순환을 촉진시키고 환기 시켜주는 것을 특징으로 한다.
소프트웨어 프로그램 소스
가. 모터 제어부 코드
#include <Encoder.h>
#include<IRremote.h> // 적외선 리모컨 라이브러리
int remote = 12; // 적외선 리모컨 수광 다이오드 신호선
int IN1_pin=7; // 모터드라이브 IN1과 연결되는 핀번호
int IN2_pin=8; // 모터드라이브 IN2과 연결되는 핀번호
int PWM_pin=9; // 모터드라이브 PWM과 연결되는 핀번호
IRrecv irrecv(remote);
decode_results results;
int mode = 0; //STOP
Encoder myEnc(3,2);
void setup() {
- // put your setup code here, to run once:
- Serial.begin(9600);
- irrecv.enableIRIn(); // 수광 다이오드 시작
- // PWM을 지원하는 디지털 9번핀을 출력모드로 설정
- pinMode(PWM_pin,OUTPUT);
- // 모터드라이버로 부터 정보를 전달하기위한 7,8번핀을 출력모드로 설정
- pinMode(IN1_pin, OUTPUT);
- pinMode(IN2_pin, OUTPUT);
- // 리모콘 신호를 받기위한 핀을 입력상태로 설정
- pinMode(remote, INPUT);
}
long oldPosition = -999;
void loop() {
- // put your main code here, to run repeatedly:
- long newPosition = myEnc.read();
- if (newPosition != oldPosition) {
- oldPosition = newPosition;
- Serial.println(newPosition);
- } //시계방향 증가, 반시계방향 감소
- switch(mode){
- case 0: //원위치로 stop
- if(newPosition > 0){
- while(newPosition <=0){
- digitalWrite(IN1_pin,LOW);
- digitalWrite(IN2_pin,HIGH);:::::
- }
- while(newPosition <=0){
- }
- else{ //stop
- digitalWrite(IN1_pin,LOW);
- digitalWrite(IN2_pin,LOW);::::
- }
- if(newPosition > 0){
- case 0: //원위치로 stop
- break;
- case 1: //RIGHT 시계방향
- digitalWrite(IN1_pin,HIGH);
- digitalWrite(IN2_pin,LOW);
- analogWrite(PWM_pin, 255);
- if (newPosition >= 54){://시계방향 18도 돌면 stop
- digitalWrite(IN1_pin,LOW);
- digitalWrite(IN2_pin,LOW);
- break;
- }
- break;
- case 2: //LEFT 반시계방향
- digitalWrite(IN1_pin,LOW);
- digitalWrite(IN2_pin,HIGH);
- analogWrite(PWM_pin, 255);
- if (newPosition <= -54){://반시계방향 18도 돌면 stop
- digitalWrite(IN1_pin,LOW);
- digitalWrite(IN2_pin,LOW);
- break;
- }
- break;
- }
- if(irrecv.decode(&results))
- {
- //Serial.println(results.value, HEX);
- switch(results.value){
- case 0xFF38C7: // 리모콘의 OK 버튼을 눌렀을때
- case 0x488F3CBB:
- // 모터를 정지시키는 수식입니다.
- Serial.println("STOP");
- mode = 0;
- break;
- case 0x449E79F: // 리모콘의 오른쪽 방향 버튼을 눌럿을때
- case 0xFF5AA5:
- // 시계방향으로 일정각도만큼 돌아가도록 하는 수식입니다.
- Serial.println("Right");
- mode = 1;
- break;
- case 0xFF10EF: // 리모콘의 왼쪽 방향 버튼을 눌렀을때
- case 0x8C22657B:
- // 반시계방향으로 일정각도만큼 돌아가도록 하는 수식입니다.
- mode = 2;
- break;
- default:
- Serial.println("error");
- default:
- }
- delay(100);
- irrecv.resume(); //수광 다이오드 다음 값을 받도록하는 수식입니다.
- }
}